
دانلود شبیه سازی مقاله کنترل بازوی ربات 5 DOF با استفاده از کنترل نظارتی
| عنوان فارسی |
مدلسازی و کنترل بازوی ربات 5 DOF با استفاده از کنترل نظارتی |
| عنوان انگلیسی |
Modeling and control of 5 DOF robot arm using supervisory control |
| کلمات کلیدی |
کنترل کننده منطق فازی؛ کنترل کننده PID؛ بازوی ربات 5 DOF؛ کنترل نظارتی |
| درسهای مرتبط |
کنترل مدرن |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2010 | تعداد رفرنس مقاله : 17 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Computer and Automation Engineering, ICCAE (کنفرانس بین المللی مهندسی کامپیوتر و اتوماسیون) |
| ترجمه: دارد (ترجمه 15 صفحه ای در قالب ورد (WORD) و PDF) | گزارشکار : دارد (8 صفحه در قالب ورد (WORD) و PDF) | شبیه سازی : دارد (فایل های شبیه سازی در سیمولینک متلب با فرمت .mdl و .slx و یک فایل فازی با فرمت .fis) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب مدلسازی بازوی ربات 5 DOF
در دهه های گذشته، تغییرات سریع در کاربردهای صنعتی و تجاری از قبیل بازوهای مکانیکی ربات، انسان را ترغیب نمود تا عملکرد تکنیک کنترل مورد استفاده در بازوهای مکانیکی ربات را توسعه و افزایش دهد، زیرا امروزه برای کارهای خطرناک، پیچیده و خسته کننده، از ربات ها استفاده می شود. بازوی مکانیکی ربات یک موضوع مهم در علم کنترل به شمار می آید، زیرا دارای ویژگی های غیر خطی، پارامترهای متغیر و محاسبه زمان واقعی است. بنابراین لازم است مسیری کنترل شود که موجب می شود ابزار ربات بتوانند با دقت بالایی دنبال شوند و بدین گونه از تخریب ابزار یا ربات جلوگیری شود. در اکثر سیستم های کنترل از قبیل ربات ها، کنترلکننده PID به دلیل ساختار ساده، سهولت طراحی و استحکام در شرایط عملیاتی، محبوب ترین الگوریتم کنترلی محسوب می شود. بیش از 90% از کاربردهای مرتبط، با استفاده از کنترل PID یا اشکال آن مانند اشکال PI یا PD کنترل می شوند. تنظیم کنترل کننده PID در دو مقوله طبقه بندی می شود: مقوله اول، بهره های PID را با استفاده از فرمول تنظیم زیگلر-نیکولز (Z-N) تنظیم می کند. تنظیم دوم دستاوردهای PID با استفاده از کنترل ناظر از قبیل FLC صورت می گیرد. در روش اول، پارامترهای PID در طول الگوریتم کنترل برای اولین بار پس از انتخاب ثابت می شوند. از اینرو پارامترهای ثابت PID نمی توانند بواسطه ویژگی های غیرخطی یا پیچیده، نتایج رضایت بخشی در عملیات فرآیند ایجاد کنند. بنابراین این روش در شرایط غیرخطی، انتخاب خوبی نیست. همانطور که در روش دوم اشاره شد، دستاوردهای PID، باید در طول عملیات فرآیند به منظور غلبه بر اشکالات فرمول تنظیم سنتی، به صورت آنلاین تنظیم شود. این روش تمایل دارد تا در طول فرآیند عملیات و با استفاده از کنترل کننده نظارتی، بهره های تناسبی مشتق انتگرال را تغییر دهد. در این مورد از الگوریتم کنترل فازی با متخصص انسانی، به عنوان کنترل نظارتی برای پارامترهای PID استفاده می شود.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به محیط شبیه سازی و خروجی آن قرار داده شده است:

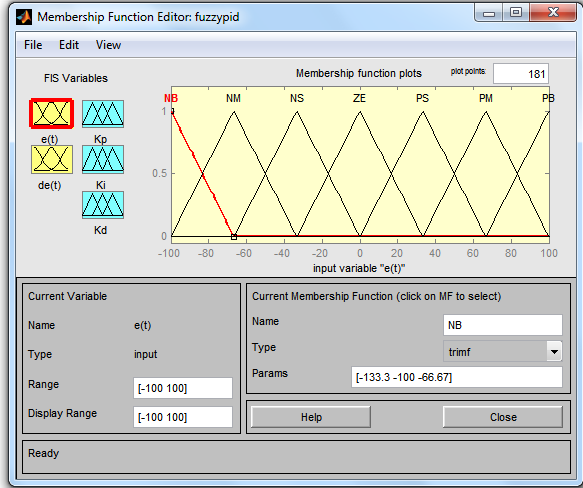
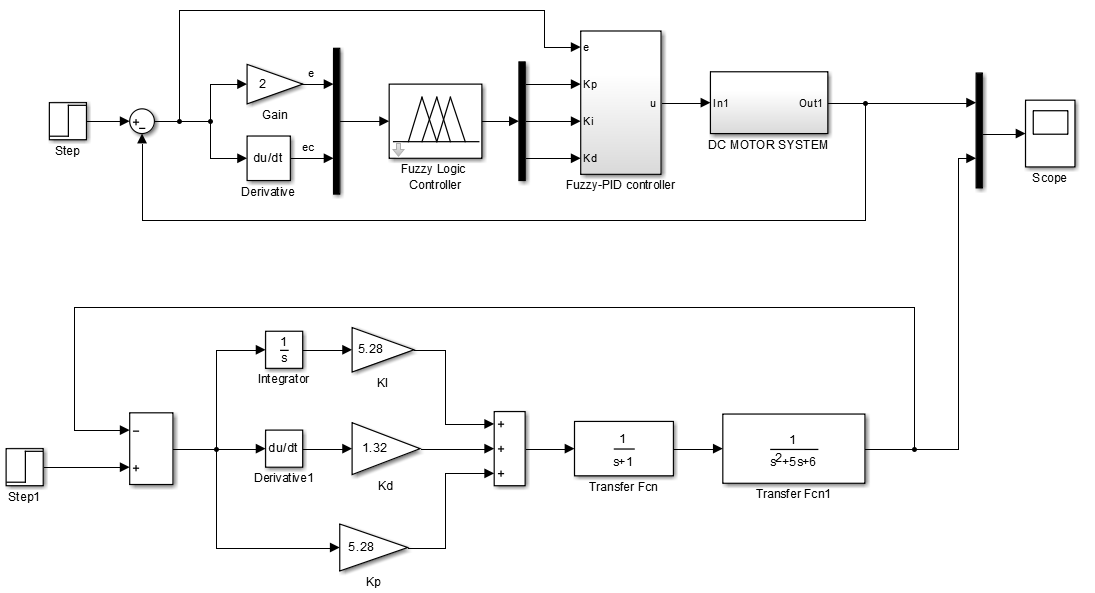
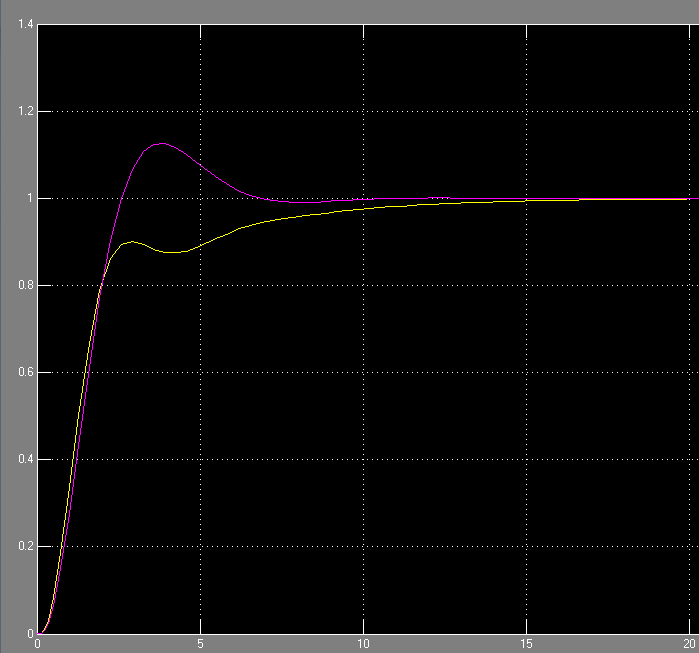
کنترل کننده PID یک تکنیک خوب در نظریه کنترل محسوب می شود، اما هنگام استفاده در سیستم های غیر خطی، دارای اشکالاتی است. تنظیم بهره های PID با استفاده از روشهای سنتی، خسته کننده است و دستیابی به نتایج بهینه، دشوار است، بنابراین در طول فرآیند FLC انتخاب خوبی برای تنظیم بهره های PID آنلاین به شمار می آید. FSC برای کنترل بازوی ربات 5DOF استفاده می شود و برای تعیین بهره PID از قوانین فازی استفاده می کند. پاسخ خروجی کنترل PID با استفاده از تنظیم فازی، با تنظیم کلاسیک مقایسه شده است. نتایج نشان داد که تنظیم پارامترهای PID بر اساس FLC بهتر از روش های تنظیم کلاسیک است.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.