
دانلود شبیه سازی مقاله تخمین حالت دینامیکی در سیستم قدرت با استفاده از فیلتر کالمن
| عنوان فارسی |
تخمین حالت دینامیکی در سیستم قدرت با استفاده از فیلتر کالمن تعمیم یافته و ورودی های نامشخص به اندازه گیری های فازور |
| عنوان انگلیسی |
Dynamic State Estimation in Power System by Applying the Extended Kalman Filter With Unknown Inputs to Phasor Measurements |
| کلمات کلیدی |
تخمین حالت دینامیکی؛ فیلتر کالمن تعمیم یافته؛ اندازه گیری های فازور؛ نظارت بر شبکه قدرت؛ بهره برداری از سیستم قدرت؛ تخمین حالت؛ ژنراتور سنکرون |
| درسهای مرتبط |
بهره برداری از سیستم قدرت |
| تعداد صفحات انگلیسی : 11 | نشریه : IEEE |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 22 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Power Systems (مجله سیستم های قدرت) |
| ترجمه: ندارد | گزارشکار : فایل راهنما دارد (9 صفحه توضیحات مربوط به کدها) | شبیه سازی : دارد (سیمولینک متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کاربرد فیلتر کالمن در تخمین حالت دینامیکی
برای افزایش پایداری و قابلیت اطمینان سیستم قدرت در حین و بعد از آشفتگی ها، استراتژی های جدیدی برای بهبود آگاهی وضعیتی بهره بردار و کنترلرهای جهانی و محلی شبکه قدرت، باید ابداع شوند. اما، طرح های نظارت و کنترل قابلیت زیاد، بسختی برروی سیستم SCADA موجود، که تنها اطلاعات یکنواخت، با تراکم نمونه گیری کم و غیرهمگام (غیرسنکرون) در مورد شبکه فراهم می کند، قابل ساخت است. اندازه گیری های SCADA بسیار کم (از نظر تعداد) هستند و ناهمگام برای استخراج اطلاعات در مورد دینامیک سیستم می باشد. این برای حذف محدودیت ها برای نصب و استفاده سریع «سیستم های اندازه گیری و کنترل مساحت گسترده» (WAMAC) با استفاده از واحدهای سنجش فازور (PMU ها)، می باشد. این سیستم ها، نظارت دینامیک سیستم قدرت همگام در یک مقیاس زمانی اصلاح شده تر را ممکن می کنند. براساس توانایی سیستم های WAMAC برای استخراج اطلاعات سیستم دینامیک، تخمینگرهای حالت یک سیستم قدرت می توانند وضعیت های دینامیک ، برای مثال زاویه های روتور مولد و سرعت مولد، را بجای وضعیت های استاتیک دامنه های ولتاژ و زوایای فاز (یا علاوه بر آن) تولید کنند. از این دیدگاه، این پروژه یک فرایند تخمین حالت دینامیک براساس فنون فیلترینگ کالمان برای تخمین وضعیت های دینامیک سیستم قدرت، ارائه می دهد.
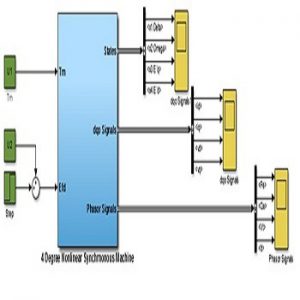
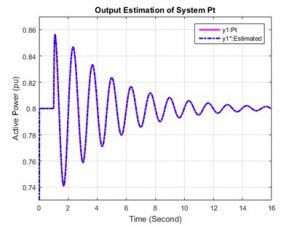
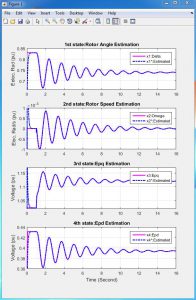
در این پروژه، دو روش مختلف برای تخمین حالت دینامیک یک سیستم قدرت شامل زاویه روتور مورد سنکرون و سرعت روتور، ارائه شدند. روش اول، تخمینگر وضعیت غیرخطی سنتی، روش EKF است که شامل مراحل خطی سازی در الگوریتم خود می باشد. نتایج شبیه سازی تخمینگر EKF، دقت مناسبی در تخمین حالت های دینامیک یک مولد مرتبه چهارم اشباع شده متصل به یک شینه نامتناهی، تحت فرآیندها و سنجش های نویزدار، را نشان دادند. اما، روش EKF ملزم می کند که همه داده های ورودی سنجش شوند یا موجود باشند که این موضوع در تعدادی از پیکربندی ها (برای مثال با تحریک کننده های بدون جاروبک) که در آنها ولتاژ میدان Efd به آسانی از اتاق کنترل نیروگاه قابل سنجش نیست، صدق نمی کند. در نتیجه EKF-UI برای پرداختن به این مسئله پیشنهاد شد. ما آنرا برای تخمین همزمان حالت های سیستم و ولتاژ ورودی مجهول Efd، پیاده سازی کردیم. استواری و اثربخش بودن روش EKF-UI پیشنهادی با بکار گیری موفق آن برای انواع مختلف ورودی های گشتاور مکانیکی Tm و ولتاژ میدان، متغیر از سیگنال های پله تا سیگنال های رمپ، ارزیابی و بررسی شد. تخمینگرهای مبتنی بر EKF توسعه یافته همچنین تحت شرایط خطای شبکه با شامل کردن نویز فرآیندی و اندازه گیری، موثر بودند.
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.