
دانلود شبیه سازی مقاله مدلسازی موتور القایی با قاب مرجع چرخان روتور
| عنوان فارسی |
مدلسازی دینامیکی موتور القایی با استفاده از قاب مرجع چرخان روتور |
| عنوان انگلیسی |
Dynamic Modeling of Induction Motor Using Rotor Rotating Reference Frame |
| کلمات کلیدی |
موتور القایی سه فاز؛ مدلسازی دینامیکی؛ برآورد پارامتر؛ سیمولینک متلب؛ قاب مرجع؛ مدل D-Q |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 9 | نشریه : IJAREEIE |
| سال انتشار : 2014 | تعداد رفرنس مقاله : 8 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering (مجله بین المللی تحقیقات پیشرفته در مهندسی برق ، الکترونیک و ابزار دقیق) |
| ترجمه: ندارد | گزارشکار : توضیحات مختصر در دو صفحه | شبیه سازی : دارد (1 فایل شبیه سازی در متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
مدلسازی دینامیکی موتور القایی
موتور القایی یکی از پرکاربردترین ماشین های الکتریکی است که در سیستم های درایو با بازدهی عملکردی بالا بکار می رود. موتور القایی قفسه سنجابی یکی از موتورهای محبوبی است که به عنوان اسب کاری /پُرقدرت صنعت مدرن شناخته می شود. علل این امر به سادگی طراحی، ساختار مقاوم، قابلیت اطمینان، قابلیت چشمگیر خود راه اندازی، و بازدهی بالا برمی گردد. موتورهای القایی به شدت غیرخطی هستند، و متغیرهای روتور الکتریکی قابل اندازه گیری نمی باشند. اثر پوستی سیم پیچ روتور، و اشباع هسته آهنی، منجر به پیچیدگی های بیشتری در فرایند مدلسازی ماشین الکتریکی می شوند. به صورت سنتی، پارامترهای دینامیک با اجرای آزمون های بدون بار و روتور قفل شده تخمین زده می شوند. بدلیل پیچیدگی رفتارهای دینامیک موتورهای القایی، استفاده از این پارامترهای دینامیک می تواند بی دقتی را در تخمین مشخصه های حالت گذرا رقم بزند. انجام این تست ها آسان نیست زیرا آن ها به مداخله و اندازه گیری برقی توسط عامل انسانی نسبت به دستگاه نیاز دارند. آزمون روتور قفل شده منجر به ایجاد فرکانس لغزش خیلی بالا می شود. ضمناً اثر پوستی بر مقاومت روتور بیشتر می شود. این شرایط منجر به بی دقتی در تخمین شرایط کاری و پارامترها می شوند. در این پروژه، مدلسازی دینامیک قاب مرجع با چرخش سنکرون برای موتور القایی بکار رفته است. ماشین القایی به صورت ریاضیاتی، و بر اساس نظریه دو محوره ماشین های الکتریکی به نمایش درآمده است. معمولاً از نمایش سیگنال دوفاز برای کاهش پیچیدگی معادلات دیفرانسیل توصیف کننده ماشین القایی استفاده می شود. همچنین حذف تمامی اندوکتانس های متغیرزمانی از معادلات ولتاژ ماشین، بدلیل وجود مدارات الکتریکی در حرکت نسبی، منجر به کاهش پیچیدگی این معادلات می شود. معادلات ولتاژ و گشتاور متغیر نسبت به زمان و توصیف کننده رفتار دینامیک موتور القایی هستند.
در درایوهایی با سرعت قابل تنظیم، رفتار گذرای موتور القایی باید در نظر گرفته بشود. بنابراین جهت مطالعه رفتار دینامیک موتور القایی در هر دو حالت گذرا و پایدار، مدلسازی ریاضیاتی دقیق موتور القایی به ازای قاب مرجعی متفاوت، با استفاده از مدلسازی d-q توسعه داده شده است. مدل فوق نسبتاً دینامیک است و قدرت بالایی برای شبیه سازی شرایط در مواجهه با تغییرات ناگهانی بار دارد. علاوه بر این، مدلسازی d-q یک رویکرد محبوب برای پیاده سازی کاربردی درایوهای موتور القایی کنترل شده با بردار است.
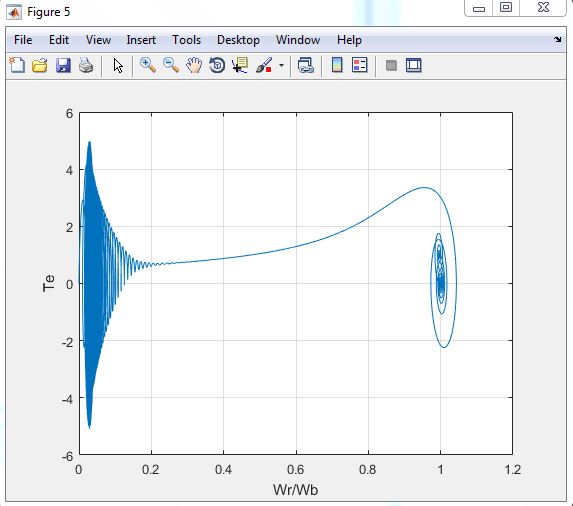
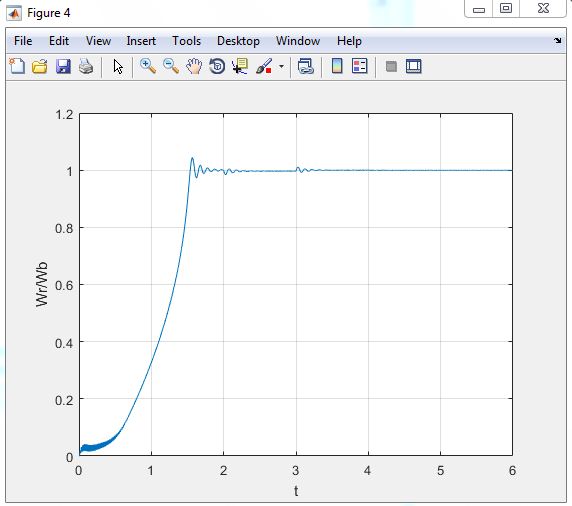
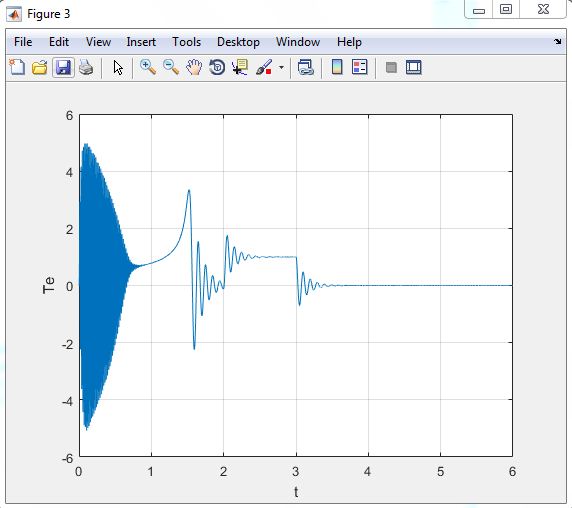
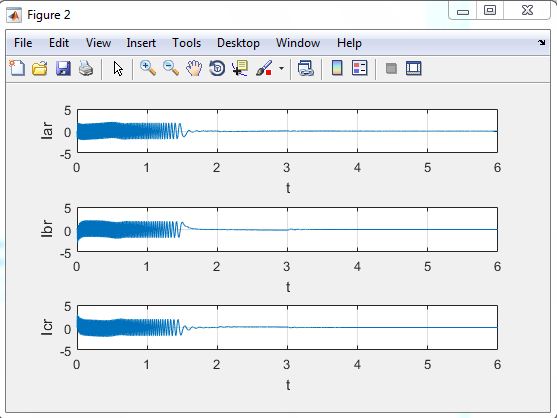
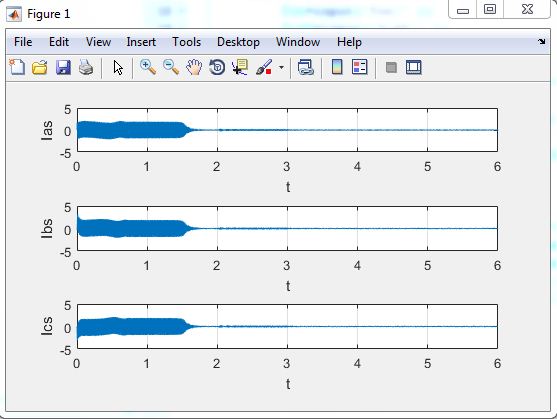
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.