دانلود شبیه سازی مقاله طراحی پایدارساز سیستم قدرت مبتنی بر کنترل کننده PID
| عنوان فارسی |
طراحی پایدارساز سیستم قدرت مبتنی بر کنترل کننده PID با استفاده از مدل فیلیپ – هفرون اصلاح شده: یک رویکرد کلونی زنبور عسل مصنوعی |
| عنوان انگلیسی |
Design of PID controller based power system stabilizer using Modified Philip-Heffron's model: An artificial bee colony approach |
| کلمات کلیدی |
کلونی زنبور عسل مصنوعی؛ مدل فیلیپ – هفرون اصلاح شده؛ SMIB؛ AVR |
| درسهای مرتبط |
دینامیک سیستم های قدرت ، کنترل |
| تعداد صفحات انگلیسی : 7 | نشریه : IEEE |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 16 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Symposium on Swarm Intelligence (SIS) (سمپوزیوم هوش ازدحامی) |
| ترجمه: ندارد | گزارشکار : فایل راهنمای 6 صفحه ای دارد که در آن به توضیح نحوه ران کردن شبیه سازی ها پرداخته شده است | شبیه سازی : دارد (فایل های شبیه سازی در متلب با فرمت .m و .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پایداری سیستم قدرت بر اساس کنترلر PID
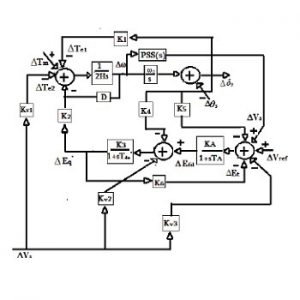
در زمان های گذشته، برای تامین تقاضای بار، برق در کنار مرکز بار به صورت محلی تولید می شد. بخاطر رشد سریع تقاضای توان در سالهای اخیر، همراه با کمبود منابع، باعث افزایش پیچیدگی و دور دست شدن سیستم های قدرت شد. در نتیجه، بارهای سنگینی برروی سیستم قدرت موجود، تحمیل می شوند. در آخر، این باعث می شود که سیستم قدرت نزدیک به حد پایداری گذرای خودش کار کند. برای تامین مطمئن برق، سیستم های قدرت امروزی، نیاز به تعادل پیوسته بین تولید برق و تقاضای بار متغیر دارد. سیستم قدرت سیستم دینامیک و غیرخطی است که اغلب تغییراتی در تولید، انتقال و شرایط بارگذاری تجربه می کند. از آنجا که سیستم های قدرت به هم پیوسته واقع شده در دوردست لازم است در ولتاژ عملکردی ثابت نگهداری شوند، رگولاتورهای ولتاژ اتوماتیک (AVR) بهره بالای اقدام سریع، برای مولدهای سنکرون، استفاده می شوند. اگرچه AVR ها برای ثابت نگه داشتن ولتاژ استفاده می شوند، اما مسئول نوسانات فرکانس پایین (0.1 تا 3 هرتز) هستند و باعث میرایی منفی برروی روتور با تولید یک مولفه از گشتاور الکتریکی غیر هم فاز با انحراف سرعت (Δω) می شود. این نوسانات ممکن است بر پایداری سیگنال کوچک تاثیر بگذارند. پایداری سیگنال کوچک، توانایی ماندن یک سیستم در حالت همگامی (سنکرونیزم) تحت اغتشاشات کوچک است که عموماً بخاطر تغییرات اندک تولید و بار می باشد. برای جبرانسازی اثر ناخواسته این AVR ها، سیگنال های مکمل اضافه (که از سیگنال انحراف سرعت Δω استخراج می شوند)، به داخل حلقه فیدبک رگولاتور ولتاژ، داده می شوند. بنابراین، استبیلایزر (تثبیت کننده) سیستم قدرت (PSS)، برای تولید میرایی مثبت برای نوسانات روتور، استفاده می شوند.
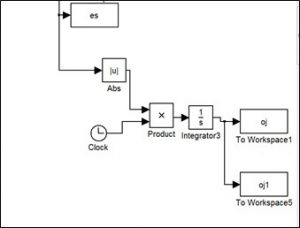
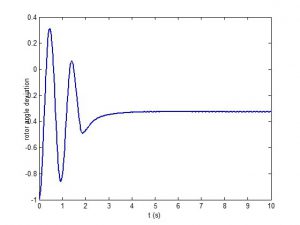
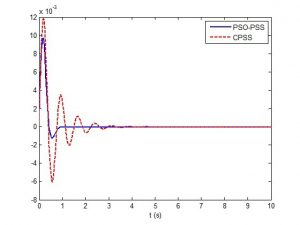
این پروژه، روشی نوین برای طراحی کنترلر PID برای سیستم قدرت ملاحظه شده با استفاده از مدل فیلیپ-هفرون اصلاح شده، ارائه می دهد. یک الگوریتم کلونی زنبور مصنوعی هوشمند جدید برای بدست آوردن پارامترهای کنترلر براساس کمینه سازی تابع هدف مبتنی بر حوزه زمانی، بکار گرفته می شود. شرایط بارگذاری مختلفی مورد ملاحظه قرار می گیرند و انحراف های سرعت و زاویه روتور متناظر ثبت می شوند. از مقادیر تجربی بدست آمده، مشهود است که روش پیشنهادی، عملکرد عالی داشته است.
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز نتایج مربوط به شبیه سازی قرار داده شده اند:





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.