دانلود شبیه سازی مقاله کنترل برداری موتور سنکرون مغناطیس دائم با متلب
| عنوان فارسی |
شبیه سازی کنترل برداری موتور سنکرون مغناطیس دائم با استفاده از متلب (MATLAB) |
| عنوان انگلیسی |
Matlab-based Permanent Magnet Synchronous Motor Vector Control Simulation |
| کلمات کلیدی |
PMSM؛ کنترل های برداری؛ متلب / سیمولینک (Matlab/Simulink) |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 4 | نشریه : IEEE |
| سال انتشار : 2010 | تعداد رفرنس مقاله : 6 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله (این محصول دارای پاورپوینت 14 اسلایدی برای ارائه کلاسی هست) |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Computer Science and Information Technology (CSIT) (کنفرانس بین المللی فناوری اطلاعات و علوم کامپیوتر) |
| ترجمه: دارد (ترجمه 10 صفحه ای در قالب ورد و پی دی اف) | گزارشکار : دارد (35 صفحه) | شبیه سازی : دارد (یک فایل شبیه سازی در متلب با فرمت .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل برداری موتور سنکرون
موتور سنکرون آهنربای دائمی (PMSM) در مقایسه با سایر اشکال موتور، دارای عملکرد دینامیکی بهتر، اندازه کوچکتر و بازده بالاتر است. در سال های اخیر، با توسعه سریع تجهیزات الکترونیکی توان الکتریکی، مواد آهنربای دائمی عنصرهای خاکی کمیاب و تحقیقات پیچیده در موتور آهنربای دائمی، PMSM به طور گسترده ای در دفاع ملی، کشاورزی و زندگی روزمره مورد استفاده قرار گرفته است. PMSM یک سیستم اتصال چند متغیره، غیرخطی و گران می باشد. گشتاور خروجی و جریان استاتور، رابطه عملکردی پیچیده ای دارند. می توان میدان مغناطیسی را جدا کرد تا به عملکرد کنترل خوبی دست یافت: این جریان بدون جریان فرکانس لغزش و تحت تأثیر پارامترهای روتور و دارای کنترل بردار آسان تر می باشد. بنابراین، مدل کنترل بردار PMSM به یک نگرانی گسترده تبدیل شده است. در این پروژه، مدل ریاضی موتور سنکرون آهنربای دائمی بر اساس استفاده از شبیه سازی قدرتمند با قابلیت های مدل سازی متلب تحلیل می شود. در متلب/سیمولینک برای ایجاد یک مدل شبیه سازی در سیستم کنترل PMSM می توان ابزارها و منابع موثری را برای تجزیه و تحلیل و طراحی سیستم کنترل سروو فراهم کرد.
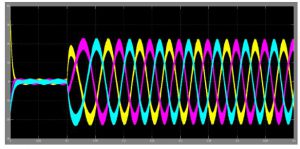
در این پروژه، شبیه سازی مدل سازی سیستم کنترل بردار PMSM مبتنی بر سیمولینک می باشد. نتایج شبیه سازی نشان می دهد که این سیستم می تواند به راحتی کار کند، دارای ویژگی های استاتیک و دینامیک خوبی است. آزمایش و اعتبار id = 0 یک الگوریتم کنترل خوب محسوب می شود. این امر یک ابزار و منبع موثر برای تجزیه و تحلیل و طراحی سیستم کنترل PMSM فراهم می کند. و راهنمای طراحی و اشکال زادیی سیستم عملی PMSM را ارائه می دهد.
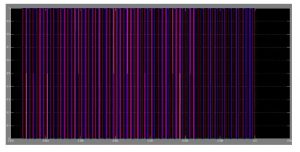
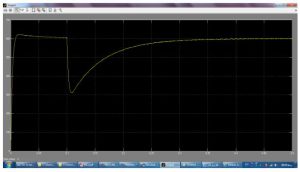
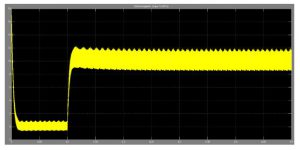
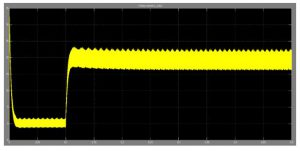
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.