
دانلود شبیه سازی مقاله کنترل سطح دینامیکی با شبکه عصبی در سیستم غیرخطی نامشخص
| عنوان فارسی |
کنترل سطح دینامیکی با استفاده از شبکه های عصبی برای کلاسی از سیستم های غیرخطی نامشخص با اشباع ورودی |
| عنوان انگلیسی |
Dynamic Surface Control Using Neural Networks for a Class of Uncertain Nonlinear Systems With Input Saturation |
| کلمات کلیدی |
کنترل پسگام؛ کنترل سطح دینامیک (DSC)؛ ناظر اختلال غیرخطی (NDO)؛ کنترل دقیق؛ سیستم غیرخطی نامشخص |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 12 | نشریه : IEEE |
| سال انتشار : 2014 | تعداد رفرنس مقاله : 57 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Neural Networks and Learning Systems (مجله شبکه های عصبی و سیستم های یادگیری) |
| ترجمه: ندارد | گزارشکار : دارد (فایل گزارشکار 22 صفحه ای + فایل راهنمای 5 صفحه ای در قالب WORD و PDF که به توضیحاتی در مورد شبیه سازی پرداخته است) (در یک فایل ویدئویی 2 دقیقه ای نیز نحوه ران شدن شبیه سازی ها نشان داده شده است) | شبیه سازی : دارد (2 فایل با فرمت .m و 6 فایل با فرمت .mdl در محیط نرم افزار متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل سطح دینامیکی در سیستم غیرخطی
در مهندسی کاربردی و عملی، تعداد زیادی از تاسیسات و سیستم ها، مشخصات غیرخطی و غیرقطعی دارند. از سوی دیگر، بزرگی سیگنال کنترل همیشه بخاطر محدودیت های فیزیکی فعال ساز، محدود است. بنابراین، توسعه روش های کنترل مقاوم موثر برای سیستم های غیرخطی غیرقطعی با اشباع ورودی، بسیار مهم است. اشباع به عنوان یکی از قیدهای غیرخطی غیرهموار معمول مربوط به ورودی کنترل، باید صریحاً در طراحی کنترل مورد ملاحظه قرار گیرند تا عملکرد کنترل مقاوم، بهبود یابد. اگر اشباع ورودی در طراحی کنترل نادیده گرفته شود، عملکرد کنترل حلقه بسته شدیداً تنزل خواهد یافت و ناپایداری ممکن است رخ دهد.
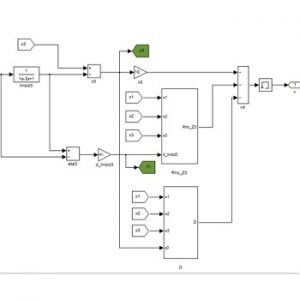
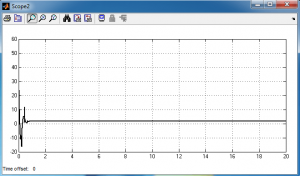
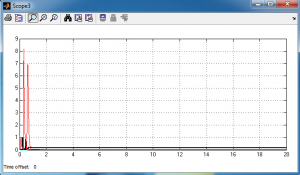
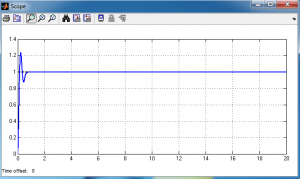
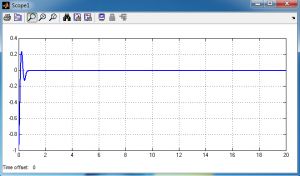
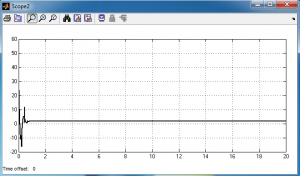
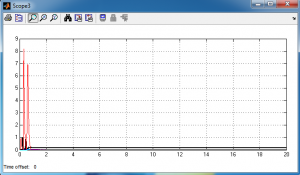
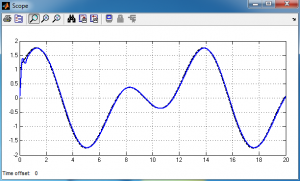
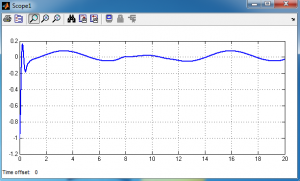
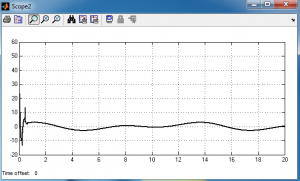
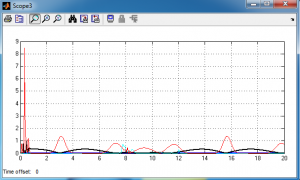
در این پروژه، طرح NN DSC مبتنی بر ناظر اغتشاش غیرخطی، برای دسته ای از سیستم های غیرخطی غیرقطعی با اشباع ورودی، ابداع شده است. برای بهبود توانایی تضعیف اغتشاش و استواری (مقاوم بودن) عملکرد سیستم، NDO برای نظارت بر آشفتگی ترکیبی مجهول استفاده شده است و سیگنال ورودی آن در ساختن طرح NN DSC مبتنی بر ناظر اغتشاش غیرخطی، بکار گرفته می شود. پایداری سیستم حلقه بسته و عملکرد ردیابی با استفاده از یک تحلیل لیاپونوف سخت گیرانه (rigorous)، اثبات و تحلیل شد. در آخر، نتایج شبیه سازی یک سیستم کنترل بازوی مکانیکی «تک پیوندی»، برای نشان دادن اثر بخش بودن طرح NN DSC مبتنی بر ناظر اغتشاش پیشنهادی، ارائه شده اند.
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.