
دانلود شبیه سازی مقاله طراحی کنترل کننده سرعت هوشمند برای سیستم درایو موتور القایی
| عنوان فارسی |
طراحی کنترل کننده سرعت هوشمند برای سیستم درایو موتور القایی کنترل شده با بردار غیرمستقیم |
| عنوان انگلیسی |
An Intelligent Speed Controller Design for Indirect Vector Controlled Induction Motor Drive System |
| کلمات کلیدی |
کنترل بردار؛ کنترل منطق فازی؛ کنترل میدان محور روتور؛ کنترل نرم موتور القایی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 7 | نشریه : ELSEVIER |
| سال انتشار : 2016 | تعداد رفرنس مقاله : 11 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله (این محصول دارای پاورپوینت 12 اسلایدی برای ارائه کلاسی هست) |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Procedia Technology (پروسدیا تکنولوژی) |
| ترجمه: دارد (ترجمه 11 صفحه ای در قالب ورد و پی دی اف) | گزارشکار : ندارد | شبیه سازی : دارد (شبیه سازی در سیمولینک متلب با فرمت .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل کننده سرعت هوشمند
استفاده از ماشین های AC سه فاز، در محیط های عملکردی مختلف روز به روز در حال افزایش است. این ماشین ها دارای یکسری محدودیت ها از جمله تولید هارمونیک، انحراف بیش از حد توان راکتیو، و دشواری کنترل سرعت در مقایسه با درایوهای DC هستند. بنابراین سناریوی عصر حاضر به مطالعه عمیق راجع به این ماشین های DC نیاز دارد. با انجام این مطالعه، رفتار و عملکرد بهینه آن ها در نواحی عملکردی مختلف مورد تجزیه و تحلیل قرار می گیرد. از بین درایوهای AC موجود، موتورهای القایی، پُرکاربردترین درایو الکتریکی بکار رفته در صنایع هستند. انتخاب آن ها بدلیل مقاومت مطلوب، اندازه کوچک، هزینه اندک و نیاز به نگهداری کمتر صورت گرفته است.
مشکل کنترل موتور القایی سه فاز ناشی از این است که در موتورهای القایی، جریان مسئول تولید گشتاور، و جریان مسئول تولید شار، از یکدیگر تفکیک نشده اند. البته می توان با معرفی تکنیک های کنترلی بهتر بر اساس کنترل برداری، بر چنین مشکلی غلبه نمود.
اصل بنیادی کنترل بُرداری در این است که در ابتدا مولفه ها از یکدیگر جدا می شوند، سپس هر مولفه به صورت جداگانه کنترل می شود. نحوه انجام این عمل، دقیقاً مشابه کنترل اعمالی برای موتور DC با تحریک جداگانه است. بدین ترتیب می توان سیستم درایو با پاسخ دینامیک مطلوب به تغییرات بار، یا سرعت مرجع را توسعه داد. در طراحی کنترل کننده های عادی توان، بر اساس اصل کنترل با جهت گیری میدان روتور (RFOC)، یک کنترل کننده PI جهت کنترل سرعت درایو موتور القایی بکار می رود. استفاده از کنترل کننده PI، با ایجاد مشکلات متعددی همچون اورشوت بالا، نوسان سرعت و گشتاور بدلیل تغییرات ناگهانی در بار و اغتشاشات خارجی همراه می شود. توانایی ضعیف برای مقابله با عدم قطعیت سیستم، به عنوان مثال تغییرات پارامتر و اغتشاشات خارجی، از جمله معایب اصلی کنترل کننده PI به شمار می رود. این رفتار کنترل کننده، منجر به تضعیف عملکرد درایو می شود. روش های کنترلی متداول به دقت مدل ریاضیاتی سیستم توسعه یافته بستگی دارند. علاوه بر این، عملکرد مورد انتظار بدلیل اغتشاش بار، اشباع موتور و تغییرات حرارتی برآورده نمی شود. کنترل خطی کلاسیک، فقط در سرعت عملکردی، بازدهی خوبی را بجا می گذارد. در این روش کنترلی، انتخاب ضرایب صحیح با پارامترهای متغیر همچون نقطه تنظیمی، با دشواری انجام می شود. از تکنیک های کنترل پیشرفته بر پایه هوش مصنوعی، تحت عنوان روش کنترل هوشمند یاد می شود. روش های کنترل هوشمند، در مقایسه با روش های کنترل تطبیقی متداول عملکرد بهتری را بجا می گذارند. منطق فازی تکنیکی برای افزودن تفکر انسانی به یک سیستم کنترلی است. روش کنترل مبتنی بر منطق فازی (FLC)، یک روش کاملاً مناسب برای درایوهای سرعت موتور القایی است، علت این است که چنین روشی هیچ نیازی به مدل ریاضیاتی دقیق موتور ندارد. کنترل با جهت گیری میدان روتور برای موتور القایی سه فاز در این پروژه پیشنهاد شده است. در طراحی این روش از کنترل کننده منطق فازی استفاده می شود.
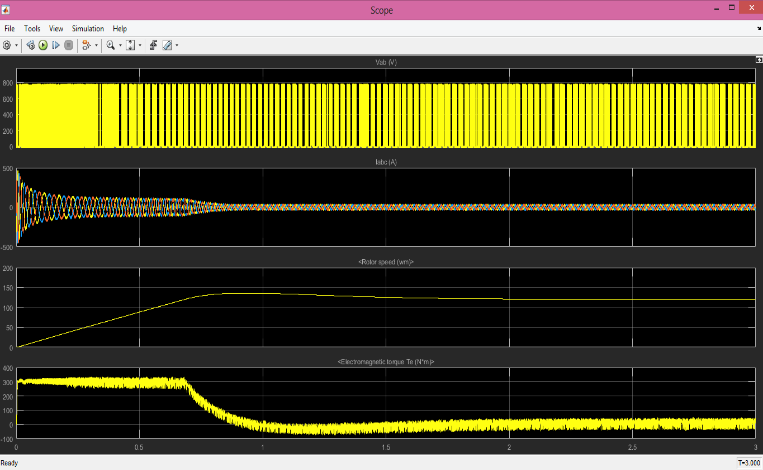
محققان با بهره گیری از کنترل کننده های PI و کنترل کننده های منطق فازی، مدل متلب/ سیمولینک را برای موتور القایی با کنترل مبتنی بر جهت گیری میدان روتور (RFOC) پیشنهاد دادند. نتایج مدل FLC، نشان دهنده بهبود / کاهش ریپل گشتاور، جریان استاتور و واکنش سرعت حالت پایدار، و نیز واکنش دینامیک هستند. با توجه به نتایج حاصله، شاهد این هستیم که جریان استاتور فاقد هرگونه آندرشوت یا اورشوت است. واکنش منحنی سرعت، برای ماشین الکتریکی مدنظر، تنها 10 % زمان ثبات / نشست کنترل کننده PI را به همراه خواهد داشت. محققان این توانایی را دارند که مدل فراگیرتر (تعمیم یافته تری) را بر اساس کنترل کننده منطق فازی توسعه بدهند.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصویر مربوط به خروجی شبیه سازی قرار داده شده است:
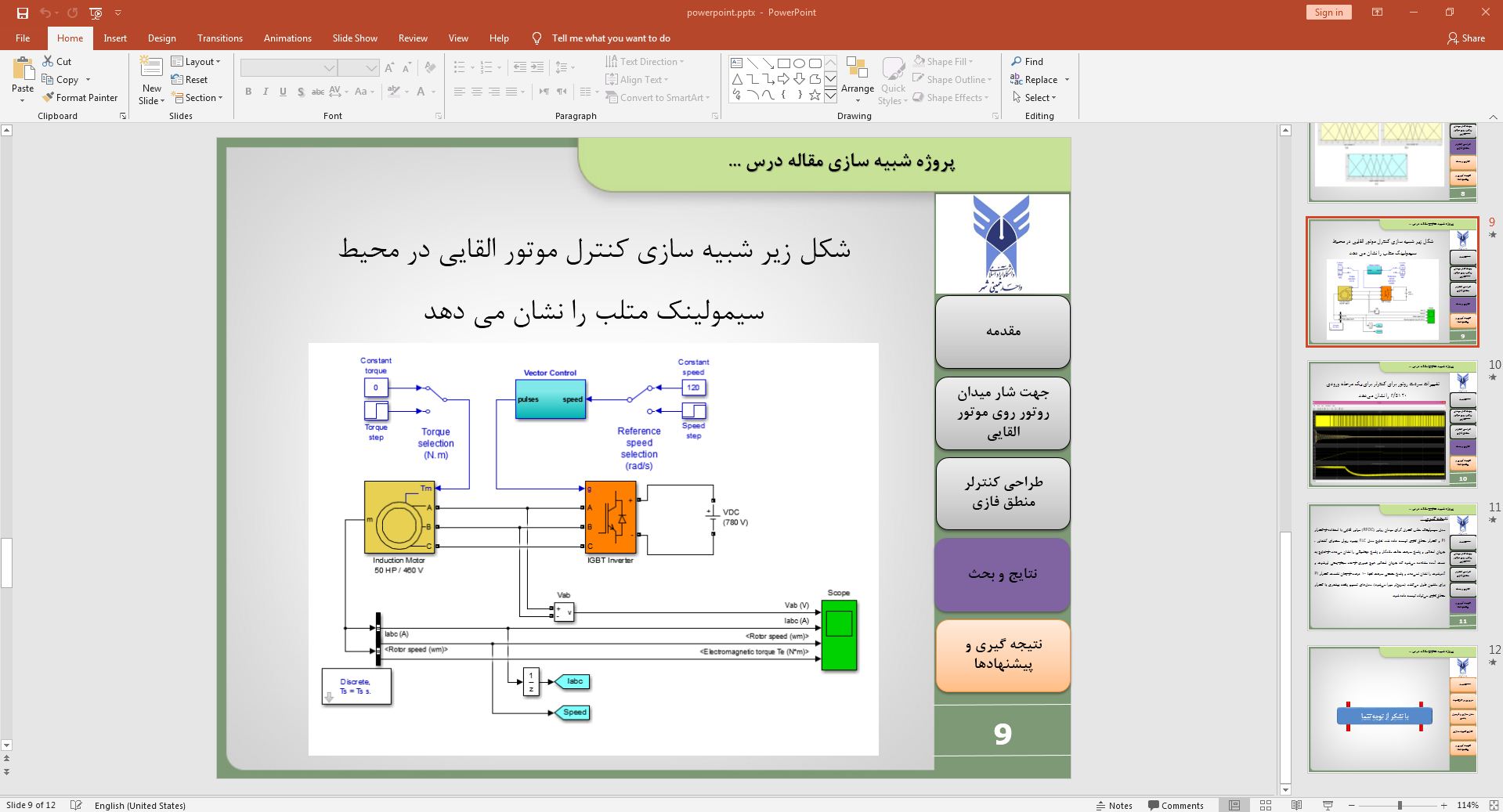
این پروژه دارای یک پاورپوینت 12 اسلایدی می باشد که در ادامه، تصویر مربوط به اسلاید شماره 9 آن قرار داده شده است:


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.