
دانلود شبیه سازی مقاله کنترل فازی تطبیقی در سیستم های غیرخطی MIMO
| عنوان فارسی |
کنترل فازی تطبیقی پایدار در سیستم های غیرخطی MIMO |
| عنوان انگلیسی |
Stable adaptive fuzzy control for MIMO nonlinear systems |
| کلمات کلیدی |
کنترل فازی تطبیقی؛ سیستم های غیرخطی MIMO؛ جبرانسازی خطاها |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 11 | نشریه : ELSEVIER |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 15 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Computers and Mathematics with Applications (کاربرد ریاضیات و کامپیوترها) |
| ترجمه: دارد (ترجمه 10 صفحه ای در قالب PDF) | گزارشکار : گزارشکار مختصر دارد (7 صفحه) | شبیه سازی : دارد (1 ام فایل متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل فازی در MIMO
در مهندسی کنترل عملی، روش های کنترل وفقی برپایه سیستم فازی توجه زیادی به خود جلب کرده اند و به عنوان رویکردهای نویدبخش برای کنترل سیستم های دینامیک بسیار غیرقطعی و غیرخطی، پدیدار گشته اند. براساس قضیه تقریب جهانی، در دو دهه گذشته، چندین طرح کنترل فازی وفقی برای یک دسته از سیستم های غیرقطعی غیرخطی «تک ورودی تک خروجی» (SISO) ابداع شده اند و سیستم های غیرقطعی غیرخطی چند ورودی چند خروجی (MIMO) در پروژه های زیادی، مورد بررسی قرار گرفته اند. تحلیل پایداری در چنین طرح هایی با استفاده از روش سنتز لیاپونوف انجام می شود. برای رسیدن به اهداف کنترلی، از جنبه مفهومی، دو رویکرد متمایز برای طراحی یک سیستم کنترل وفقی فازی وجود دارد: طرح های مستقیم و غیرمستقیم. در روش مستقیم، یک سیستم فازی برای توصیف عملکرد کنترلی استفاده می شود و پارامترهای سیستم فازی مستقیماً تنظیم می شوند تا هدف کنترلی برآورده شود. برخلاف طرح های مستقیم، روش وفقی غیرمستقیم از سیستم های فازی برای برآورده کردن دینامیک های سیستم استفاده می کند و سپس یک قانون کنترلی براساس این برآوردها طراحی می شود. در طرح های وفقی غیرمستقیم، مسئله تکین بودن احتمالی کنترلر معمولاً رفع می شود.
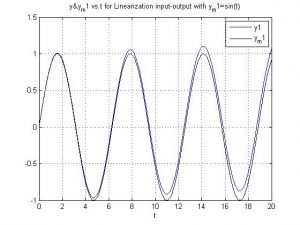
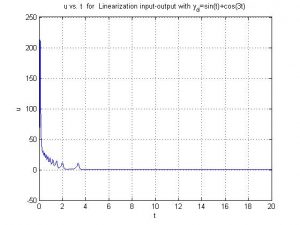
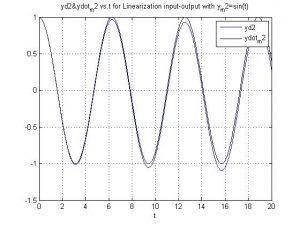
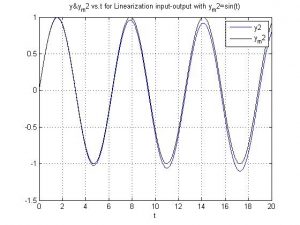
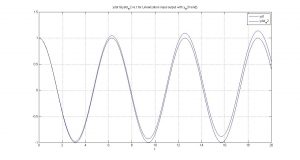
در این پروژه، یک طرح کنترل فازی وفقی غیرمستقیم برای یک دسته از سیستم های غیرخطی چند ورودی و چند خروجی (MIMO) که دینامیک های آن بخوبی درک نشده اند، ارائه می شود. در این طرح، سیستم های فازی برای تقریب دینامیک های مجهول سیستم بکار گرفته می شوند. برای غلبه بر مسئله تکین بودن کنترلر، ماتریس بهره تخمین زده شده به حاصلضرب یک ماتریس قطری و دو ماتریس متعامد تجزیه می شود ، یک جمله کنترلی تقویت کننده برای جبرانسازی خطاهای تجمعی استفاده می شود و همه قوانین وفقی پارامتری و جمله کنترل تقویت کننده براساس تحلیل پایداری لیاپونوف استخراج می شوند. طرح پیشنهادی تضمین می کند که همه سیگنال های سیستم حلقه بسته حاصله، «به صورت در نهایت کراندار یکنواخت» (UUB)، می باشند. علاوه بر آن، خطاهای ردگیری را می توان به اندازه کافی کوچک کرد اگر پارامتر طراحی به گونه ای انتخاب شود که به اندازه کافی بزرگ باشد. یک مثال شبیه سازی برای نشان دادن اثربخشی طرح کنترل پیشنهادی استفاده می شود.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده است. گزارشکار مختصری از مراحل و نحوه شبیه سازی آماده شده که داخل محصول قرار گرفته و با خرید و مطالعه آن می توانید با کلیات کار آشنا گردید. در ادامه نیز تعدادی از نتایج خروجی شبیه سازی ها قرار داده شده است:


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.