
دانلود شبیه سازی مقاله کنترل قدرت جرثقیل زیردریایی تک پیانو با استفاده از روش کنترل فیدبک از خروجی
| عنوان فارسی |
کنترل قدرت فعلی یک سیستم جرثقیل زیردریایی تک پیانو با استفاده از تکنیک کنترل بازخورد خروجی با تاخیر |
| عنوان انگلیسی |
Active sway control of a single pendulum gantry crane system using output-delayed feedback control technique |
| کلمات کلیدی |
قطری سازی، کنترل پذیری ، رویت پذیری ، کنترلر فیدبک حالت، رویت گر |
| درسهای مرتبط |
کنترل خطی، مدل سازی |
| تعداد صفحات انگلیسی : ۵ | نشریه : IEEE |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 16 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Control Automation Robotics & Vision |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات شبیه سازی در 4 صفحه) | شبیه سازی : دارد (یک فایل شبیه سازی در متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل سیستم چرثقیل با فیدبک از خروجی
یک سیستم SPGC یک جرثقیل حمل سبد با مکانیسم حرکتی یا ثابت است که در محیط صنعتی مدرن برای انتقال بارهای سنگین از یک موقعیت به دیگری به همان سرعت و به همان اندازه ممکن است بدون برخورد با تجهیزات دیگر مورد نیاز است. حرکت پایه سیستم SPGC شامل جابجایی جرثقیل، بارگیری و کاهش بار است.
در این مقاله یک SPGC که از مدل hoist ثابت است در نظر گرفته شده است. در صورت جابجایی سریع جرثقیل، جابجایی وسیع از مکانیسم جابجایی صورت می گیرد. هدف این کار طراحی ODFC برای کنترل زاویه چرخش مکانیسم کشش است. این مشکل کنترل شبیه به مسئله کنترل ارتعاش در سیستم است. پیدا کردن روش های کنترل که لرزش و یا نوسانات را از طیف گسترده ای از سیستم های فیزیکی را از بین می برد، برای چند دهه گذشته مورد توجه بوده و یکی از این موارد کاربرد کنترل لرزش از اهمیت صنعتی است که کنترل جرثقیل فرعی است. استراتژی های کنترل فعال ارتعاش برای کنترل لرزش در ساختارهای فیزیکی یا سیستم ها، اصل استفاده شده در اینجا است، بنابراین آن را به عنوان کنترل گشتاور فعال می نامیم. توجه کنید از سیستم کنترلی مقاله برای بدست آوردن موارد زیر استفاده شده است:
۱-قطری سازی،
۲-کنترل پذیری،
۳-رویت پذیری،
۴-کنترلر فیدبک حالت(روش بس و گیورا)،
۵-طراحی رویت گر حالت
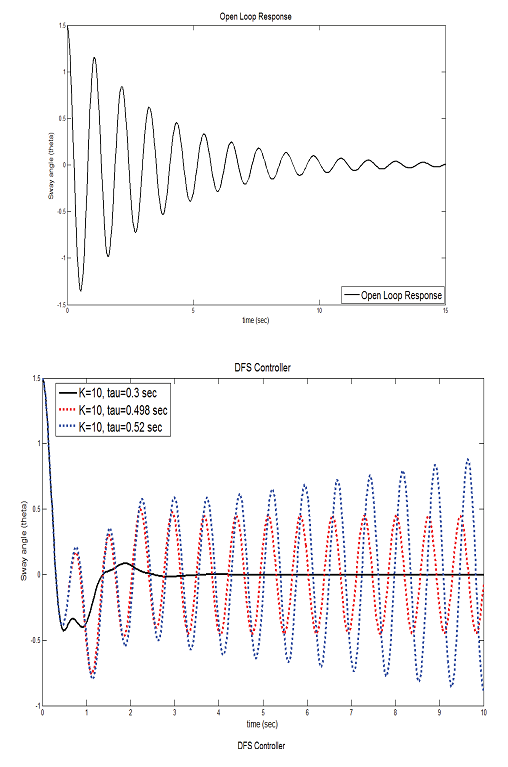
شبیه سازی های این مقاله در نرم افزار متلب صورت گرفته است و در ادامه بخشی از نتایج حاصل از شبیه سازی ها نشان داده شده است.
کنترل قدرت جرثقیل زیر دریایی با استفاده از تکنیک کنترل بازخورد خروجی با تاخیر



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.