دانلود شبیه سازی مقاله کنترل موقعیت موتور القایی با ناظر و کنترل کننده مد لغزشی
| عنوان فارسی |
کنترل موقعیت موتور القایی با استفاده از ناظرها و کنترل کننده مد لغزشی تطبیقی |
| عنوان انگلیسی |
Position Control of the Induction Motor Using an Adaptive Sliding-Mode Controller and Observers |
| کلمات کلیدی |
موتور القایی؛ کنترل میدانی؛ کنترل موقعیت؛ کنترل و ناظر مد لغزشی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 10 | نشریه : IEEE |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 22 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Industrial Electronics (مجله الکترونیک صنعتی) |
| ترجمه: ندارد | گزارشکار : فایل راهنما دارد (20 صفحه) | شبیه سازی : دارد (فایل های شبیه سازی در محیط سیمولینک متلب با فرمت .mdl و .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
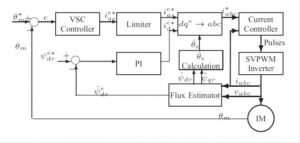
کنترل موقعیت موتور القایی
موتورهای القایی (IM)، استفاده گسترده ای در کاربردهای صنعتی مانند ماشین ابزارها، ماشین های فرزکاری و سنباده، داشته اند، که این به خاطر عملکرد خوبشان به لطف معماری مستحکم، ممان اینرسی کم، ریپل گشتاور پایین و گشتاور اولیه زیاد، می باشد. برای تنظیم IM در کاربردهای پرتقاضا، چندین روش کنترلی توسعه یافته، که یکی از آنها روش کنترل میدانی است، که یکی از پرطرفدارترین روش ها می باشد. روش کنترل میدانی، فرامین کنترل گشتاور و شار را برای IM، تفکیک می کند، اما همچنان عملکرد کنترلی سیستم حاصله تحت تاثیر عدم قظعیت ها، که معمولاً از تغییرات پیش بینی نشده پارامترها، آشفتگی های بیرونی بار و دینامیک های مدل نشده و غیرخطی تشکیل می شوند، قرار می گیرد. بنابراین، مطالعات بسیاری برروی محرک های موتور، برای حفظ عملکرد تحت این تغییرات پارامتر و آشفتگی بار بیرونی انجام شده که می توان کنترل پیش بینی کننده، کنترل وفقی، کنترل مقاوم یا استوار، کنترل فازی و کنترل گشتاور مستقیم، را نام برد. کنترل مد لغزشی، یک کنترل مقاوم غیرخطی است که می تواند بر عدم قطعیت های مدل و آشفتگی های بیرونی غلبه کند و در نتیجه برای کنترل IM بسیار جذاب است. اغلب از کنترل موقعیت در تعدادی از کاربردهای درایوهای الکترونیک، مانند سیستم های روبوتیک، تسمه نقاله ها و غیره، استفاده می شود. در این کاربردها، در حالت سنتی موتورهای DC بخاطر رفتار خطی شان، مورد استفاده قرار می گیرند. موتور القایی قفس سنجابی، تعدادی ویژگی ساختاری عالی مانند قابلیت اطمینان، بازده بالا، قوی بودن، هزینه کم و تعمیر و نگهداری کم دارد که باعث می شود استفاده از یک IM برای تعدادی از کاربردها، بسیار جذاب شود. اما، کنترل موقعیت IM، بخاطر ساختار غیرخطی بسیار تزویج شده، تعدادی معایب دارد که باید با استفاده از کنترلرهای پیشرفته تر، رفع شوند. در این کاربردها، عدم قطعیت و آشفتگی های بیرونی نیز وجود دارند و بنابراین یک سیستم کنترل مقاوم که عملکرد کنترل مطلوب را تحت این وضعیت ها حفظ می کند، غالباً نیاز می باشند. از این نظر، در سالهای گذشته، کنترل مد لغزشی، در بسیاری از مطالعات و پژوهش ها برای کنترل موقعیت موتورهای القایی، مورد توجه قرار گرفته اند.
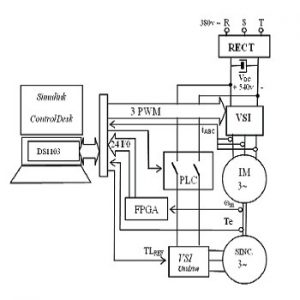
در این پروژه، یک طرح تنظیم موقعیت موتور القایی با استفاده از یک SMC وفقی برای کاربردهای بلادرنگ، ارائه شده است. طرح پیشنهادی، از یک قانون وفقی برای بهره لغزشی، جهت محاسبه مقدار بهره لغزشی مناسب، برای غلبه بر عدم قطعیت های سیستم، استفاده می کند. سیگنال کنترلی این SMC وفقی، کمتر از سیگنال های کنترل SMC سنتی خواهد بود، زیرا در آخرین مورد، مقدار بهره لغزشی باید به اندازه کافی بالا انتخاب شود تا بر همه عدم قطعیت های احتمالی که در گذر زمان می تواند در سیستم ظاهر شود، غلبه شود. علاوه بر آن، برای عدم نیاز به سنسورهای شار، یک تخمینگر شار روتور SM و ناظر گشتاور بار برای بهبود عملکرد کنترلر، پیشنهاد می شوند. علاوه بر آن، ناظرها و کنترلر پیشنهادی، بار محاسباتی زیادی تحمیل نمی کنند و بنابراین به آسانی در یک پردازنده DSP کم هزینه، قابل پیاده سازی است. در آخر اینکه، شبیه سازی و تست تجربی برروی یک IM موجود در بازار، تایید کردند که این طرح کنترل موقعیت، در عمل، عملکرد خوبی از خود ارائه می دهد و اینکه هدف ردیابی موقعیت، تحت عدم قطعیت های سیستم و همچنین تحت تغییرات گشتاور بار و مقاومت، حاصل می شود.
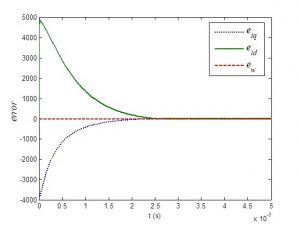
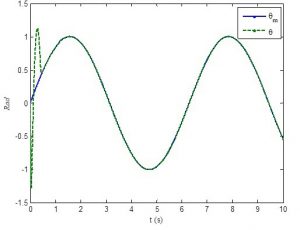
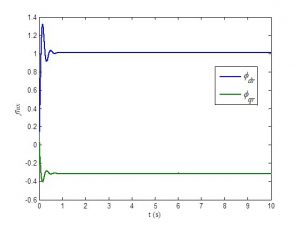
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.