
دانلود شبیه سازی مقاله روش های کنترل گشتاور مستقیم در درایو موتور القایی
| عنوان فارسی |
طراحی ریپل گشتاور مینیمم جهانی برای کنترل گشتاور مستقیم درایو موتور القایی |
| عنوان انگلیسی |
Global Minimum Torque Ripple Design for Direct Torque Control of Induction Motor Drives |
| کلمات کلیدی |
درایو موتور القایی؛ روش های مینیمم سازی؛ اینورتر مدولاسیون عرض پالس؛ کنترل گشتاور |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 9 | نشریه : IEEE |
| سال انتشار : 2010 | تعداد رفرنس مقاله : 28 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Industrial Electronics (مجله الکترونیک صنعتی) |
| ترجمه: دارد (ترجمه 19 صفحه ای در قالب ورد و پی دی اف) | گزارشکار : ندارد | شبیه سازی : دارد (متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل گشتاور موتور القایی
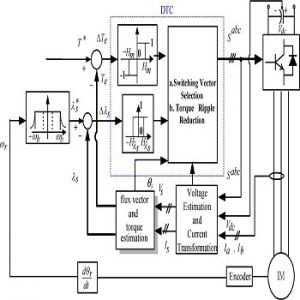
برای طراحی یک درایو موتور القایی با عملکرد بالا، یکی از بارزترین پیشرفت ها، کنترل میدانی (FOC) است که کار اساسی آن، شناسایی موقعیت فضایی شار روتور و جریان استاتور است. به این صورت، گشتاور الکترومغناطیسی، اساساً حاصلضرب خارجی یا برداری شار و جریان درست مثل یک موتور dc می باشد. اما، برای FOC، زاویه شار برای تبدیل لازم است که این به روش شناسایی حساس است. روش دیگر، از نظریه کنترل غیرخطی، مانند کنترلر خطی سازی فیدبک، برای دستیابی به تزویج زدایی ورودی-خروجی، استفاده می کند. کنترل غیرخطی با استفاده از خطی سازی فیدبک غیرخطی، نیاز به محاسبه این زاویه ندارد. اما، در این الگوریتم، پیچیده است. کنترل گشتاور مستقیم (DTC) در دهه های اخیر به عنوان یک روش کنترل معتبر برای درایورهای موتور با کیفیت شناخته شده، از زمانی که توسط تاکاهاش و ناگوچی و دیپنبراک (با عنوان خودکنترل مستقیم)، اختراع شده است. علاوه بر آن، استفاده از پارامترهای ماشین را به حداقل می رساند و پیچیدگی الگوریتم های دخیل در FOC و روش های خطی سازی فیدبک را کاهش می دهد. توجه داشته باشید که FOC تلاش می کند تا رفتار بسیار دینامیک یک موتور dc را تکرار و تقلید کند. گشتاور را می توان بوسیله حاصلضرب شار روتور و جریان استاتور بیان نمود. قطعاً باید شار روتور و جریان استاتور تولید شود. باید زاویه فاز بردار شار روتور را بدانیم. در نتیجه، FOC با کنترل جریان های مستقیم و تربیع استاتور بر روی جریان های مطلوب، حاصل می شود.
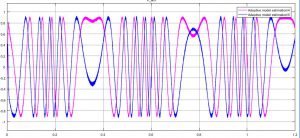
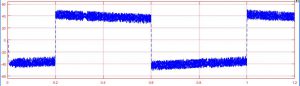
این پروژه، یک روش ساده اما موثر برای کاهش ریپل گشتاور برای کنترل گشتاور مستقیم (DTC) درایوهای موتور القایی، پیشنهاد می دهد. DTC پیشنهادی، یک ریپل گشتاور کمینه سراسری (یا جهانی) حاصل می کند که ضابطه «حداقل ریشه مربعات» (rms) ریپل گشتاور را برآورده می کند. چنین DTC ریپل حداقل گشتاور سراسری قبلاً استخراج نشده بود. DTC ریپل حداقل گشتاور سراسری پیشنهادی یک طراحی دو مرحله ای است. مرحله اول، خطای گشتاور تا صفر در انتهای دوره کنترل را استخراج می کند. سپس، مرحله دوم، بایاس گشتاور و ریپل rms را با اصلاح الگوهای کلیدزنی نامتقارن بردارهای ولتاژ اعمالی مرحله اول و تبدیل به الگوهای کلیدزنی متقارن، کاهش می دهد. تحلیل نظری انجام می شود تا نشان داده شود که ریپل گشتاور DTC پیشنهادی، یک ریپل rms حداقل سراسری است. علاوه بر آن، برای تایید اثربخشی این پروژه، یک سیستم درایو DTC موتور القایی تجربی مبتنی بر DSP، ساخته می شود. نتایج شبیه سازی و تجربی تایید می کنند که عملکرد ریپل گشتاور بهبود یافته است.
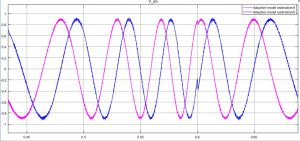
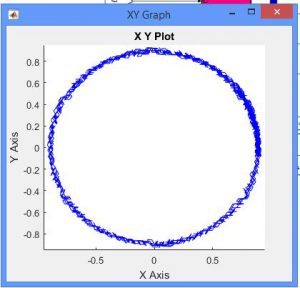
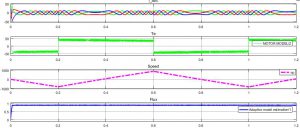
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.