
دانلود شبیه سازی مقاله استفاده از الگوریتم خفاش برای محلی سازی شبکه حسگر بیسیم
| عنوان فارسی |
استفاده از الگوریتم خفاش اصلاح شده برای محلی سازی شبکه حسگر بیسیم (WSN) |
| عنوان انگلیسی |
Modified Bat Algorithm for Localization of Wireless Sensor Network |
| کلمات کلیدی |
شبکه حسگر بیسیم؛ محلی سازی؛ الگوریتم خفاش؛ الگوریتم خفاش اصلاح شده |
| درسهای مرتبط |
مهندسی کامپیوتر |
| تعداد صفحات انگلیسی : 14 | نشریه : Springer |
| سال انتشار : 2015 | تعداد رفرنس مقاله : 13 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Wireless Personal Communications (ارتباطات شخصی بی سیم) |
| ترجمه: ندارد | گزارشکار : ندارد | شبیه سازی : دارد (متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
مکانیابی گره با الگوریتم خفاش اصلاح شده
پیشرفت های اخیر در سیستم های رادیویی و تعبیه شده، ازدیاد شبکه های حسگر بی سیم را ممکن ساخته است. شبکه های حسگر بی سیم (WSN ها)، به میزان زیادی در محیط های مختلف استفاده می شوند تا امور نظارتی مختلف مانند جستجو، نجات، ردیابی هدف و تعدادی وظایف در محیط های هوشمند را انجام دهند. در بسیاری از چنین وظایف و کارهایی، مکانیابی گره، نقشی کلیدی ایفا می کند. مکانیابی گره، برای گزارش دادن منشاء رویدادها، کمک به گروه «پرس و جو کننده» حسگرها، مسیریابی و پاسخ به سوالات در مورد پوشش شبکه لازم است. بنابراین، یکی از چالش های اساسی در شبکه حسگر بی سیم، مکانیابی گره است. در یک شبکه حسگر، تعداد زیادی گره حسگری وجود دارند که در مکان های از پیش تعیین نشده، نصب می شوند. در اکثر کاربردهای شبکه حسگری، اطلاعات گردآوری شده بوسیله این ریز حسگرها، بی معنی خواهند بود مگر اینکه مکانی که از آنجا اطلاعات بدست می آیند، مشخص و معلوم باشند. این باعث می شود تا قابلیت های مکانیابی در شبکه های حسگر بسیار مطلوب گردد. از جنبه نظری، یک دستگاه سنجش مکانیابی و استقرار، مانند «سیستم موقعیت یابی جهانی» (GPS) را می توان برای مکانیابی خود حسگر استفاده نمود. اما، استفاده از GPS در هر گره حسگر، عملی نیست که این بخاطر آن است که یک شبکه حسگر از هزاران گره تشکیل شده است و GPS بسیار پرهزینه خواهد بود. از سوی دیگر، GPS در همه محیط های داخل ساختمان کار نمی کند، بنابراین راهکارهای جایگزین باید بکار گرفته شود. برای حل این مسئله، روش های مکانیابی بسیاری توسعه یافته اند. بجای اینکه ملزم کنیم همه گره ها GPS نصب کنند، همه روش های مکانیابی فرض می کنند که تنها تعداد اندکی به سخت افزار GPS مجهز شوند. این گره ها، اغلب گره های لنگر نامیده می شوند و موقعیت خود را می دانند. حسگرهای نرمال دیگر می توانند با حسگرهای مجاور معدودی ارتباط برقرار کنند و فواصل بین آنها را با استفاده از تعدادی الگوریتم مکانیابی تخمین بزنند [برای مثال، قدرت سیگنال دریافتی (RSS)، زمان رسیدن (ToA)] و سپس موقعیت خود را براساس فواصل استخراج نمایند.
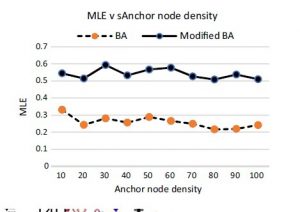
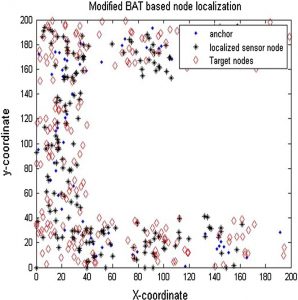
الگوریتم خفاش اصلی، دقت خوبی دارد، زیرا خطای مکانیابی میانگین کمتری نسبت به الگوریتم پیشنهادی دارد. اما، نرخ همگرایی (زمان محاسبه) و نرخ موفقیت (تعداد گره های مکانیابی شده) این الگوریتم آنچنان خوب نیست. جهت بهبود این دو پارامتر، الگوریتم خفاش با استفاده از ایده حرکت «کموتاتیک» (تاکتیک شیمیایی) باکتریهای الگوریتم خوراک جویی باکتری، اصلاح می شود. الگوریتم پیشنهادی برروی مسئله مکانیابی WSN بکار گرفته می شود. با استفاده از این نتایج، نتیجه گیری می شود که الگوریتم خفاش اصلاح شده نرخ همگرایی بهتر (زمان محاسبات کمتر) و نرخ موفقیت زیاد (مکانیابی تعداد گره های بیشتر) در مقایسه با الگوریتم خفاش اصلی دارد. علاوه بر آن، مقاوم بودن و استواری، پارامتر بسیار مهمی نیز برای کاربرد عملی است. نتایج شبیه سازی نشان می دهند که الگوریتم خفاش اصلاح شده نسبت به الگوریتم خفاش اصلی، مقاوم تر است.
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی شبیه سازی قرار داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.