
دانلود شبیه سازی مقاله حذف پدیدهی Chattering در کنترلکنندهی لغزشی
| عنوان فارسی |
حذف پدیدهی Chattering در کنترلکنندهی لغزشی فازي برای هدايت موشک |
| عنوان انگلیسی |
A Study of Chattering Suppression in Sliding Mode-Based Missile Guidance Law |
| کلمات کلیدی |
کنترل لغزشی، کنترل کننده فازی، هدایت موشک، شبیه سازی در متلب |
| درسهای مرتبط |
کنترل تطبیقی، کنترل غیر خطی، سیستم کنترل |
| تعداد صفحات انگلیسی : ۴ | نشریه : IEEE |
| سال انتشار : ۲۰۱۱ | تعداد رفرنس مقاله : ۱۰ |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE International Forum on Strategic Technology |
| ترجمه: ندارد | گزارشکار : دارد | شبیه سازی : در متلب |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پدیده Chattering در هدايت موشک
در زمینه هدایت موشک ها و کنترل موشک بحث ها و مقالات فراوانی وجود دارد که با توجه به تهمیت این موضوع تحقیقیات بسیاری در این زمینه صورت گرفته است.
شاید بیشترین کاربرد راهنمایی برای موشک های کمینه محوری PN به علت سادگی ذاتی و سهولت اجرای آن باشد. به خوبی شناخته شده است که قانون PN قصد دارد میزان LOS را در برابر هیچ اهداف مانور نادیده بگیرد، با این که نرخ موشکی متناسب با نرخ LOS است. با این حال، با ظهور اهداف بسیار مانور پذیر، PN ساده نشان می دهد کمتر مطلوب است.
علاوه بر این، کشیدن آیرودینامیک غفلت شده بر مانور بودن و سرعت موشک تاثیر می گذارد و منجر به از دست رفتن عملکرد در ارتفاعات بالاتر و در حال ترس از هدف های عقب نشینی می شود. برای حذف بعضی از این معایب، یک کلاس جدید قانون راهنمایی مبتنی بر نظریه حالت کشویی (SMC) پیشنهاد شده است. مزیت اصلی این قوانین راهنمایی این است که آنها به دینامیک غیرمجاز حساس هستند. از همه مهمتر، آنها نسبتا ساده هستند که بتوانند در برابر طیف وسیعی از مانورهای هدف، پیاده سازی و ارائه دهند.
کنترل حالت کشویی (SMC) یک روش کنترل کارآمد برای تثبیت سیستم با ویژگی غیر خطی و عدم قطعیت است. به خصوص، سیستم کنترل حالت حالت کشویی ایده آل، منعطف کننده پارامترها و اختلالات بیرونی است. اگرچه این تکنیک دارای خواص مقاومتی خوب است، کنترل حالت کشویی خالص، اشکالاتی را شامل می شود که نیاز به کنترل و کنترل دارند. برای کاهش تراکم و عملکرد بهتر ترجیح داده شده، به جای عملکرد سیگنال در طراحی SMC یک عملکرد مداوم ایجاد می کند.
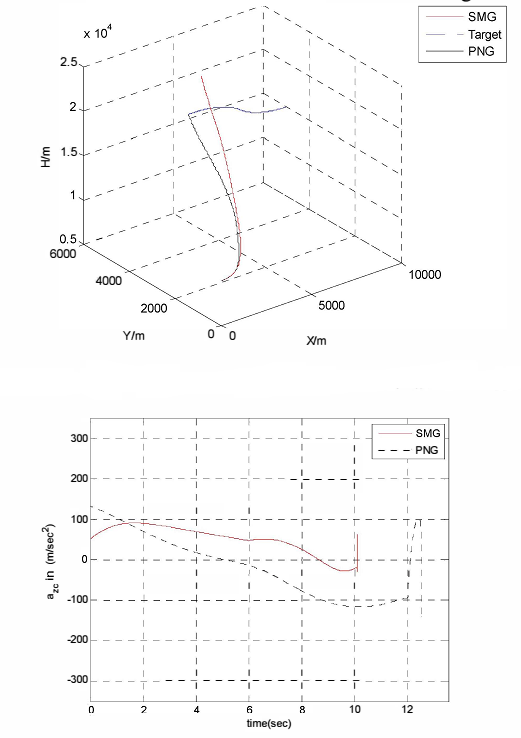
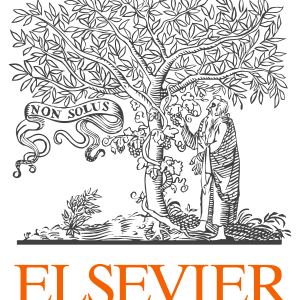
شبیه سازی های این مقاله در متلب صورت گرفته است و در ادامه بخشی از نتایج شبیه سازی ها نشان داده شده است.
حذف پدیدهی Chattering در کنترلکنندهی لغزشی هدایت موشک

نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.