
دانلود شبیه سازی مقاله کنترل مد لغزشی برای سیستم های لوپر دو ورودی و دو خروجی
| عنوان فارسی |
کنترل مد لغزشی برای سیستم های لوپر دو ورودی و دو خروجی (TITO) |
| عنوان انگلیسی |
Sliding Mode Control for Two-input and Two-output (TITO) Looper Systems |
| کلمات کلیدی |
کنترل مد لغزشی؛ دو ورودی دو خروجی (TITO)؛ سیستم های لوپر؛ کنترل دیکوپلینگ |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 4 | نشریه : IEEE |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 9 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Chinese Control and Decision Conference (کنفرانس تصمیم گیری و کنترل) |
| ترجمه: دارد (ترجمه 11 صفحه ای در قالب WORD و PDF) | گزارشکار : ندارد | شبیه سازی : دارد (2 فایل شبیه سازی در سیمولینک متلب با فرمت .mdl و .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
شبیه سازی سیستم های لوپر TITO
نوردهای داغ (HSM ها)، فرآیندهای بسیار پیچیده ای هستند که اخیراً با افزایش فشار رقابت، تعدادی از پژوهشگران به دنبال پیدا کردن روش های کنترل جدیدی برای بهبود کیفیت و تولید آن می باشند. یک نورد داغ، یک دال حرارت دیده است که در دستگاه پیش نورد، و زنجیره های پرداخت، نورد می شود و نوار نورد شده، سرد می شود. در دستگاه پیش نورد، دال های بازگرمایش شده تا عرض مدنظر تولید می شوند. سپس ورقه حاصله به دستگاه نورد نهایی منتقل می شود و در آنجا ضخامت نهایی بیشتر کاهش می یابد. نوار حاصله سپس تابیده می شود تا پیچه (coil) نوار فولادی تشکیل شود. در دستگاه نورد نهایی، برای دستیابی به ابعاد مدنظر، کیفیت و تلرانس نهایی، چندین مرحله نورد با نورد متوالی اجرا می شوند. کنترل کشش، راهکار عملیات های نورد موفق و عملکرد موفقیت آمیز سیستم های فرعی کنترل کننده کیفیت محصول، مانند دقت، عرض و ویژگی های مکانیکی، می باشد. دستگاه های حلقه انداز، بین هر استند نورد قرار می گیرند تا یک کنترل کشش مهم را انجام دهند، کنترل کشش دستگاه حلقه انداز، در نورد داغ مهم است، زیرا بر کیفیت نوار و همچنین رزوه سازی نوار (strip threading) تاثیر می گذارند. سیستم حلقه انداز، نقش مهمی در تنظیم دبی جرمی نوار با تجمیع و کنترل کشش نوار دارد که این امر بر عرض نوار تاثیر می گذارد. علاوه بر آن، طراحی کنترل مقاوم (در برابر تغییر پارامتر)، مسئله دشواری بخاطر اثر متقابل بین زاویه حلقه انداز و کشش نوار است. بسیاری از پژوهشگران، یک سری طرح کنترل را برای این مسئله کنترلی در سیستم کنترل حلقه انداز پیشنهاد کرده اند و بکار گرفته اند که می توان مواردی مانند کنترل PID، کنترل هوشمند، کنترل بهینه و کنترل مد لغزشی را نام برد، اما با این حال، افزایش شدید تقاضا برای نوار با کیفیت، بهبود بیشتر در این زمینه کنترلی را می طلبند. اخیراً، مشتریان بسیاری از شرکت های تولید فولاد، شدیداً درخواست کرده اند که کیفیت محصول را بالاتر ببرند. بنابراین، بازبینی و اصلاح سیستم های کنترل موجود لازم می باشد. یکی از چالش های ما، ارتقای سیستم های کنترل حلقه انداز، برای حصول کنترل کشش بهتر، می باشد، و کنترل مد لغزشی، یک کنترل مقاوم است که بخاطر توانایی اش در تحمل آشفتگی بیرونی و عدم قطعیت پارامتری، مناسب بودن آن برای یک سیستم حلقه انداز چند متغیری دو ورودی و دو خروجی، مشهور است و الگوریتم های کنترل پیشرفته بسیار براساس این ساختار کنترلی بکار گرفته شده اند و نشان داده شده که عملکرد کنترل بهینه ای حاصل می کند. با اینکه چندین طرح کنترل برای سیستم غیرقطعی پیشنهاد شده، اما تعداد بسیار اندکی از این طرح ها برای سیستم حلقه انداز، کارایی دارند. برای حل همزمان مسائل ذکر شده در بالا، در این پروژه، یک کنترلر مد لغزشی مقاوم را طراحی می کنیم. این طرح را می توان برای سیستم های حلقه انداز غیرقطعی همراه با اغتشاش، بکار گرفت. سیستم حلقه انداز غیرقطعی اصلی اولین بار برای طراحی کنترلر به یک شکل استاندارد تبدیل شد. سپس براساس سیستم تبدیل شده، با استفاده از روش عاملی آکرمن و روش قانون کنترل هم ارز، یک کنترلر مقاوم برای کنترل کشش طراحی می شود و پایداری آن اثبات می شود. نشان دادیم که طرح پیشنهادی پایداری مجانبی مطمئن دارد و در سناریوهای مختلف مقاوم است و می تواند بدقت مقدار مطلوب را ردیابی کند و در نتیجه کیفیت محصول مناسب و رزوه دادن نوار (strip threading) را تضمین می کند.
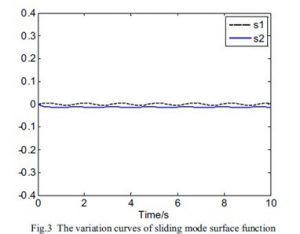
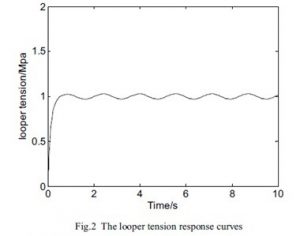
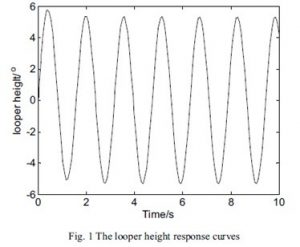
شبیه سازی این مقاله در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از خروجی های شبیه سازی قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.