
دانلود شبیه سازی مقاله کنترلر سوئیچینگ برای کنترل سیستم غیر خطی
| عنوان فارسی |
کنترل کننده سوئیچینگ برای کنترل سیستم غیر خطی نامشخص |
| عنوان انگلیسی |
A Switching Controller for Uncertain Nonlinear Systems |
| کلمات کلیدی |
کنترل کننده غیر خطی، کنترلر سویچینگ، سیستم نا مشخص، کنترلی پایدار |
| درسهای مرتبط |
کنترل خطی، کنترل غیر خطی، مدل سازی سیستم |
| تعداد صفحات انگلیسی : ۸ | نشریه : IEEE |
| سال انتشار : ۲۰۰۲ | تعداد رفرنس مقاله : ۱۹ |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Control Systems Magazine |
| ترجمه: ندارد | گزارشکار : حاوی گزارش فارسی | شبیه سازی : دارد (متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل کننده سوئیچینگ سیستم غیر خطی
کنترل سیستم های غیرخطی دشوار است، زیرا هیچ ابزار ریاضی سیستماتیک برای کمک به یافتن شرایط لازم و کافی برای تضمین ثبات و عملکرد آن وجود ندارد. اگر برخی از پارامترهای سیستم ناشناخته باشد، مشکل پیچیده تر می شود. با استفاده از یک مدل فازی Takagi-Sugeno-Kang یا مدل فازی TSK، یک سیستم غیر خطی می تواند به عنوان یک مجموع وزنی از بعضی از زیر سیستم ها بیان شود.
این مدل یک ساختار ثابت را برای برخی از سیستم های غیر خطی ارائه می دهد و بنابراین تجزیه و تحلیل را تسهیل می کند. دو روش برای به دست آوردن مدل فازی وجود دارد: 1) با استفاده از روش های شناسایی با داده های ورودی-خروجی از سیستم یا 2) به طور مستقیم از مدل ریاضی سیستم غیرخطی. در تحقیقات اخیر در مورد ثبات سیستم های فازی که توسط یک مدل فازی و یک کنترل کننده فازی ساخته شده است، شرایط پایداری چندگانه به دست آمده است. یک کنترل کننده خطی نیز برای کنترل سیستم ارائه شده توسط مدل فازی پیشنهاد شده است.
اکثر کنترل کننده های فازی ارائه شده از توابع عضویت در مدل فازی است. از این رو، توابع عضویت مدل فازی باید شناخته شوند. این به این معنی است که پارامترهای غیرخطی باید شناخته شوند یا باید ثابت باشند که روش شناسایی برای استخراج مدل فازی استفاده می شود. عملا پارامترهای بسیاری از سیستم های غیرخطی در طول عملیات تغییر خواهد کرد (برای مثال، بار یک مبدل قدرت DC-dc یا تعداد مسافرین در قطار). در این موارد، ویژگی قدرتمندی از کنترل کننده فازی یک نگرانی مهمی است. علاوه بر این، تحقیقات تنها با یک مشکل تنظیم مواجه بودند، به طوری که کنترل کننده ها تمام حالت های سیستم را به صفر می رساندند.
در عمل، ممکن است با یک مشکل تنظیم مقطع غیرضروری یا یک مشکل ردیابی مواجه شویم. برای مقابله با این مشکلات، برخی از الگوریتم های منطقی فازی با تئوری کنترل تطبیقی یا نظریه کنترل H بی نهایت را می توان یافت. در این مقاله، یک کنترل کننده سوئیچینگ برای کنترل سیستم های غیرخطی با پارامترهای ناشناخته در مرزهای شناخته شده پیشنهاد شده است. در این مقاله ، سیستم غیرخطی با استفاده از یک مدل فازی ارائه شده است. این کنترل کننده سوئیچینگ قادر به شناسایی حالت های سیستم است که به دنبال مدل های مرجع می باشد. کنترل کننده سوئیچ شامل چند کنترل کننده خطی است. یکی از کنترل کننده های خطی در هر لحظه بر اساس یک طرح سوئیچینگ، که بر اساس نظریه ی پایداری Lyapunov مشتق شده است، مورد استفاده قرار می گیرد.
همچنین در این مقاله از دو نوع کنترلر سوئیچینگ و کنترلر خطی برای کنترل سیستم پاندول معکوس استفاده شده است. شبیه سازی های مقاله در نرم افزار متلب انجام شده است و در ادامه بخشی از نتایج شبیه سازی ها نشان داده شده است.
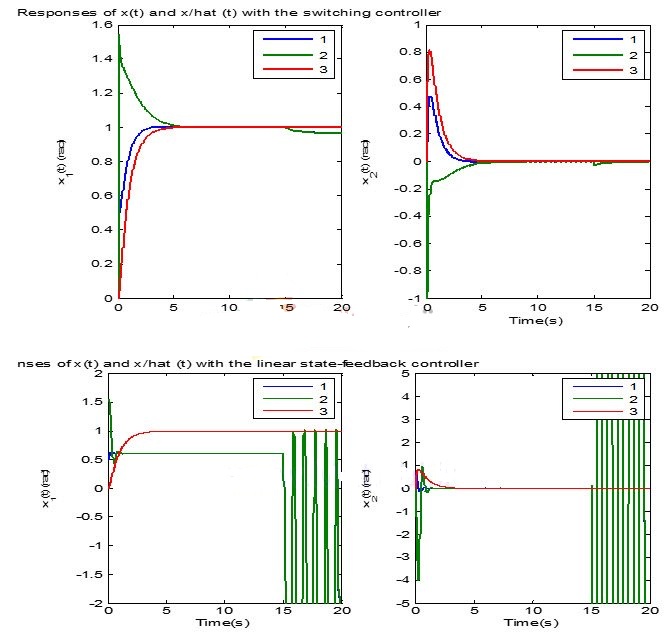
کنترلر سوئیچینگ و کنترلر خطی برای کنترل سیستم غیر خطی


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.