
دانلود شبیه سازی مقاله بهبود یادگیری شبیه ساز متلب در آزمایشگاه ماشین آلات الکتریکی
| عنوان فارسی |
بهبود یادگیری با استفاده از شبیه ساز متلب (MATLAB) در آزمایشگاه پیشرفته ماشین آلات الکتریکی |
| عنوان انگلیسی |
Learning improvement by using Matlab simulator in advanced electrical machinery laboratory |
| کلمات کلیدی |
یادگیری درایو ماشین القایی (IM)؛ آموزش ناظر شار مدل کامپوزیت؛ زاویه برآورد فضای شار روتور؛ کلمات بردار |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 13 | نشریه : ELSEVIER |
| سال انتشار : 2010 | تعداد رفرنس مقاله : 11 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Procedia - Social and Behavioral Sciences (پروسدیا - علوم اجتماعی و رفتاری) |
| ترجمه: ندارد | گزارشکار : گزارشکار مختصر دارد (9 صفحه در قالب WORD و PDF که به توضیحات مربوط به نحوه شبیه سازی و خروجی های آن پرداخته است) | شبیه سازی : دارد (چهار فایل شبیه سازی در متلب با فرمت های .m و .slx و .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه یادگیری شبیه ساز متلب
در علوم مهندسی، در مقایسه با علوم نظری محض، معمولاً شانس پیش بینی رفتار عمومی انواع سیستم ها را با مدلسازی پدیده ها داریم. نرم افزار شبیه ساز، نقش بسیار مهمی در این داستان ایفا می کند. علاوه بر آن، با شبیه سازی بجای انجام آزمایشات تجربی، که معمولاً هزینه های بسیاری دارند و وقت گیر است، رفتار سیستم های مختلف را می توان مورد بررسی قرار داد. در این پروژه، شبیه سازی درایو ماشین های القایی مورد بررسی قرار می گیرد. ماشین های القایی کاربرد گسترده ای به عنوان مبدل در لوازم خانگی دارد. از سوی دیگر، امروزه در شرایطی که سرعت دینامیک و استاتیک زیاد یا عملکرد کنترل موقعیت لازم باشند، نظریه کنترل برداری در درایوهای کنترل شده با ماشین های القایی معمولاً بکار گرفته می شوند. صرفنظر از استراتژی کنترل انتخاب شده (کنترل برداری مستقیم یا غیرمستقیم، که برروی ولتاژها یا جریان های ترمینال استاتور کار می کنند، و مادول بردار شار استاتور، روتور یا شکاف هوا را ثابت نگه می دارد)، معمولاً سنسور موقعیت یا سرعت روتور بکار گرفته می شود. اخیراً، تلاش های پژوهشی هنگفتی صرف کنار گذاری موقعیت روتور از سیستم کنترل سرعت شده است. هدف این پروژه، بهبود یادگیری دانشگاهی با مطالعه درایو موتور القایی کنترل شونده با جریان از طریق شبیه سازی می باشد. با پیاده سازی این شبیه سازی برروی ادوات آزمایشگاه ماشین الکتریکی پیشرفته، دانشجویان می توانند نتایج شبیه سازی و آزمایشی را با هم مقایسه کنند. همچنین، یک درایو کنترل برداری کیفیت بالا با بکارگیری ناظر شار روتور ارائه می شود. تخمین پارامترهای ماشین الکتریکی برای کنترل سرعت متغیر با استفاده از فنون جهت میدانی که در سیستم های خدمات ساختمانی مانند درایوهای آسانسور، درایوهای فن و پمپ ها و غیره بسیار پرکاربرد هستند، انجام می شوند. بجای مدل های ناظر CM و VM در سیستم درایو کنترل شونده با بردار، استفاده از ناظر مدل ترکیبی، سیستم درایو را قادر به کار در کل دامنه سرعت با عملکرد قابل قبول تر، کرده است.
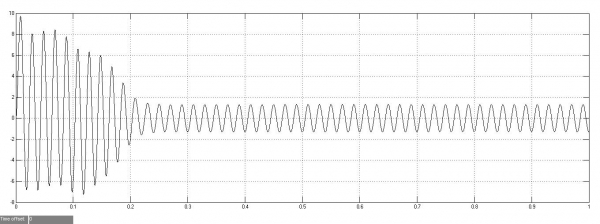
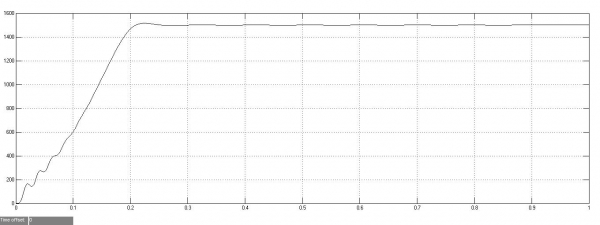
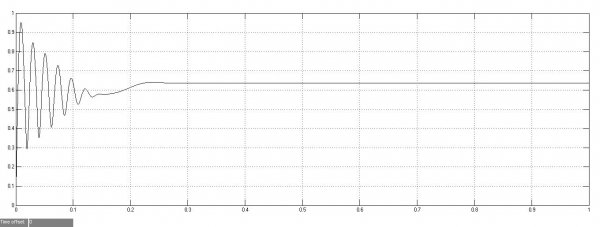
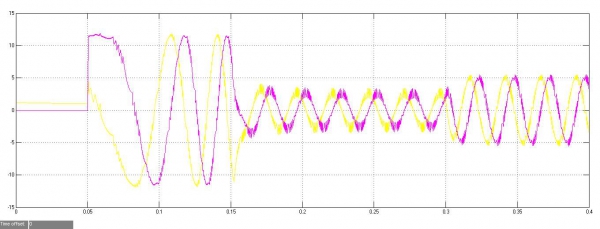
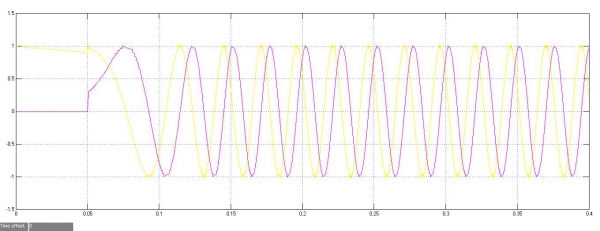
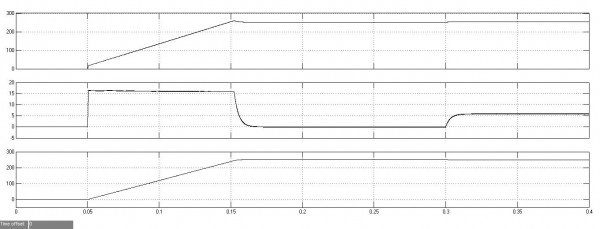
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده اند:




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.