دانلود شبیه سازی ردیابی خودروها و تعیین موقعیت آنها با فیلتر کالمن
ردیابی وسایل نقلیه، دارای کاربردهای زیادی می باشد. وضوح تصویر بیشتر دوربین های ترافیکی، پایین می باشد. در بسیاری از موارد ردیابی چند شیء، تشخیص آنها از همدیگر به دلیل شباهت آنها، کار ساده ای نیست. در این پروژه، ما روشی را برای ردیابی و تعیین موقعیت چندین شیء تشریح کرده ایم و اشیا نیز در این شبیه سازی همان خودروها می باشند. در این راستا از فیلتر کالمن برای تشخیص ویژگی هایی چون رنگ و فاصله استفاده کرده ایم. در واقع، فضای حالت خودروها با استفاده از فیلتر کالمن برآورد شده و شرایط اولیه نیز بر اساس داده های مربوط به جاده قید شده اند. این روش می تواند تمامی خودروها را به صورت جداگانه تشخیص دهد. الگوریتم پیشنهادی در محیط نرم افزار متلب (MATLAB) شبیه سازی شده است.

| گزارشکار: توضیحات مربوط به دستورات در داخل کدها نوشته شده است | شبیه سازی : دارد (یک ام فایل متلب) |
ردیابی خودرو با فیلتر کالمن
در اصول آمار و کنترل، فیلتر کالمان، که به تخمین درجه دوم خطی (LQE) نیز معروف است، الگوریتمی است که از یک سری سنجش مشاهده شده در گذر زمان، که حاوی نویز استاتیک و غیرخطی های دیگر است، استفاده می کند و برآوردهایی از متغیرهای مجهول حاصل می کند که معمولاً نسبت به برآوردهای مبتنی بر فقط یک بار اندازه گیری، با برآورد یک توزیع احتمال مشترک بر متغیرهایی برای هر قاب زمانی، دقیقتر می باشند.
فیلتر کالمان کاربردهای متعددی در فنآوری دارد. یکی از کاربردهای معمول، برای هدایت، ناوبری و کنترل وسایل نقلیه، بخصوص هواپیما، فضاپیما و کشتی های مکان یابی شده به صورت دینامیک، می باشد. علاوه بر آن، فیلتر کالمان، یک مفهوم بسیار پر استفاده در تحلیل سری زمانی استفاده شده در زمینه هایی مانند پردازش سیگنال و اقتصاد سنجی می باشد. همچنین فیلترهای کالمان یکی از موضوعات اصلی در زمینه برنامه ریزی و کنترل حرکت روبات می باشد و گاهی در بهینه سازی مسیر شامل می شوند. همچنین فیلتر کالمان برای مدل سازی کنترل حرکت سیستم عصب مرکزی عمل می کند. بخاطر تاخیر زمانی بین صدور فرمان های موتور و دریافت بازخورد حسی، استفاده از فیلتر کالمان از یک مدل واقع بینانه، برای انجام برآورد وضعیت فعلی سیستم موتور و صادر کردن فرمان های بروز شده، پشتیبانی می کند.
در این پروژه به بررسی کاربرد فیلتر کالمن در ردیابی خودروها و تعیین موقعیت آنها پرداخته شده است.
تعدادی فنآوری نظارت بر ترافیک استفاده شده است. دوربین های ترافیکی، روش انعطاف پذیرتری از نظارت بر ترافیک، حاصل می کنند. این دوربین ها نه تنها در امور ساده ای مانند شمارش ماشین ها قابل استفاده هستند، بلکه همچنین پتانسیل و ظرفیت استفاده در کاربردهای پیچیده تر مانند ردیابی را دارند. ردیابی چند هدفی یک موضوع پژوهشی مهم در بینایی کامپیوتر می باشد. این سیستم توانایی سروکار داشتن با مشکلات تک هدفی مانند انسداد بوسیله ظاهر متغیر زمینه، نورتابی، حرکت غیرصلب و مشکلات چندهدفی مانند انسداد بین هدف ها و اشتباه گرفتن هدف، را دارد.
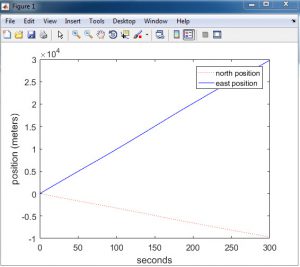
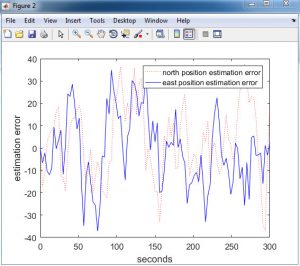
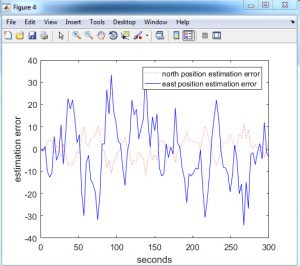
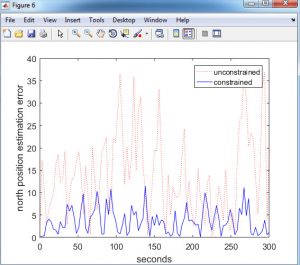
این شبیه سازی در نرم افزار متلب انجام شده و در ادامه نیز بخشی از نتایج خروجی آن قرار داده شده است:

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.