دانلود شبیه سازی مسیریابی ربات مستقل با الگوریتم بهینه سازی PSO
یک ربات خودمختار، رباتی است که با درجه زیادی از اختیار (بدون تاثیر بیرونی) رفتارها یا کارها را اجرا می کند. روبوتیک خودمختار، معمولاً یک رشته فرعی از هوش مصنوعی، روبوتیک و مهندسی اطلاعات است. نسخه های اولیه توسط نویسنده / مخترع، دیوید ال هایزرمن، پیشنهاد و نشان داده شد. روبوت های خودمختار در زمینه هایی مانند فضاپیما، خانه داری (مانند تمیزکاری)، تصفیه فاضلاب و تحویل کالاها و خدمات، بسیار مطلوب می باشند. در این پروژه، به بررسی روش های مسیریابی ربات مستقل با استفاده از الگوریتم بهینه سازی ازدحام ذرات (PSO) پرداخته ایم و این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) پیاده سازی شده است.

| گزارشکار: یک فایل ویدئویی دو دقیقه ای از نحوه اجرای شبیه سازی در این محصول قرار داده شده است | شبیه سازی : دارد (6 ام فایل متلب) |
مسیریابی ربات مستقل
امروزه، روبوت های متحرک، کاربرد گسترده ای در زمینه های بسیاری مانند کاربردهای نظامی، جستجوی فضا، وضعیت های اضطراری مانند خطرات آتش سوزی و فوریت های پزشکی و غیره، دارند. روبوت کارهای بسیار وقت گیر را به نحو موثر و کارآمد بدون مداخله انسانی، انجام می دهد. برای مقابله با چنین وضعیت هایی، اصطلاح «برنامه ریزی مسیر» ابداع شده است. در برنامه ریزی مسیر، لازم است روبوت برروی یک مسیر خاص حرکت کند چه آن محیط برای روبوت آشنا باشد یا خیر. در طی کاوش انواع موانع و سدها پیش روی روبوت قرار می گیرند و لازم است به نحو ایمن بدون تصادم بر آنها غلبه کنند و مسیر مناسب را از مبداء تا نقطه هدف، پیدا کنند. بسیاری از محققان، مسئله برنامه ریزی مسیر روبوت متحرک را با استفاده از الگوریتم های کلاسیک و ابتکاری، حل کرده اند.
در این پروژه، از روش بهینه سازی ازدحام ذرات جهت مسیریابی و برنامه ریزی مسیر ربات ها استفاده شده است.
PSO، یک الگوریتم برپایه جمعیت است که در آن دسته ذره ها در هر تکرار وارد تابع هدف می شوند و طبیعت را به صورت فردی و اجتماعی با تابع برازش مقایسه می کنند و نرخ همگرایی زیادی حاصل می کنند. سرعت هر ذره در هر تکرار با توجه به رفتار درونی و اجتماعی ذرات، به روز می شود. بخاطر این مشخصه آپدیت و به روز کننده PSO، این روش نسبت به همه الگوریتم های تکاملی دیگر منحصربفرد شده است.
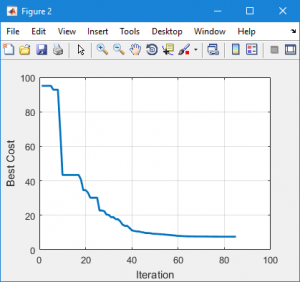
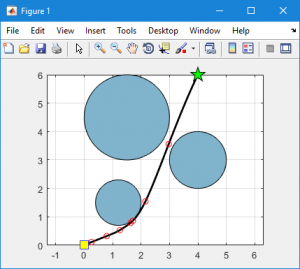
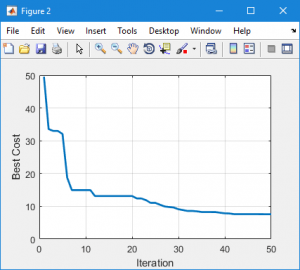
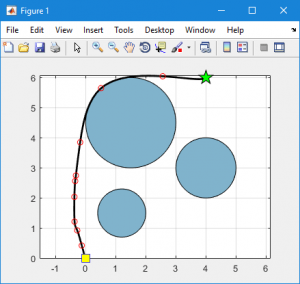
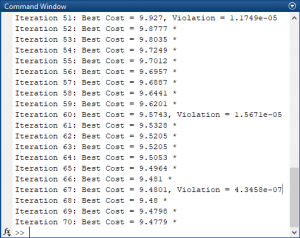
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:

دیدگاهها

مریم –
سلام.میشه لطفا مقاله مربوط رو بذارید؟
mirbagher_fara –
با سلام
این پروژه از روی مقاله خاصی انجام نشده و صرفاً یک شبیه سازی می باشد