
دانلود شبیه سازی مقاله برآورد H بینهایت جهت بهینه سازی تابع عضویت فازی
| عنوان فارسی |
برآورد H بینهایت جهت بهینه سازی تابع عضویت فازی |
| عنوان انگلیسی |
H∞ estimation for fuzzy membership function optimization |
| کلمات کلیدی |
یادگیری؛ تخمین؛ آموزش؛ بهینه سازی؛ گرادیان کاهشی؛ فیلترینگ کالمن؛ فیلترینگ H بینهایت؛ فیلترینگ Minimax؛ محدودیت ها |
| درسهای مرتبط |
کنترل؛ منطق فازی |
| تعداد صفحات انگلیسی : 19 | نشریه : ELSEVIER |
| سال انتشار : 2005 | تعداد رفرنس مقاله : 36 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Approximate Reasoning (مجله بین المللی استدلال تقریبی) |
| ترجمه: دارد | گزارشکار : دارد | شبیه سازی : دارد (متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
برآورد H بینهایت
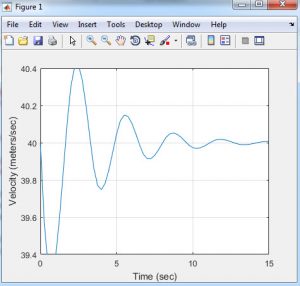
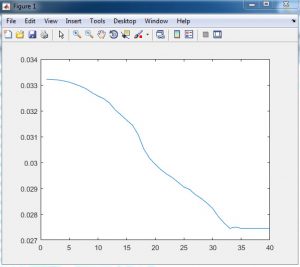
با داشتن یک سیستم منطق فازی، چگونه می توانیم توابع عضویتی را تعیین کنیم که بهترین عملکرد را حاصل می کند؟ اگر توابع عضویت را به یک شکل خاص (برای مثال، مثلث یا ذوزنقه) محدود کنیم، آنگاه هر تابع عضویت را می توان بوسیله تعداد اندکی متغیر پارامتر بندی نمود و مسئله بهینه سازی عضویت را می توان به یک مسئله بهینه سازی پارامتر، کاهش داد. بنابراین، مسئله بهینه سازی پارامتر را می توان به صورت یک مسئله فیلترینگ غیرخطی فرموله نمود. در این پروژه، مسئله فیلترینگ غیرخطی را با استفاده از نظریه برورد وضعیت H∞، حل نموده ایم. اما، توابع عضویتی که از این رویکرد حاصل می شوند (بطور کلی)، نرمال مجموع نمی باشند. یعنی، مقادیر تابع عضویت در هر نقطه از حیطه، به 1 اضافه نمی شوند. بنابراین، فیلتر H∞ را با افزودن قیدهای حالت اصلاح می کنیم به گونه ای که توابع عضویت حاصله، جمع نرمال داشته باشند. نرمالی یا بهنجاری حاصلجمع نه تنها برای جاذبه شهودی آن مطلوب است بلکه همچنین به دلایل محاسباتی در پیاده سازی بلادرنگ سیستم های منطق فازی، جذابیت دارد. روش های پیشنهادی در این پروژه برروی یک کنترل کروزکنترلر فازی خودرو پیاده سازی شده و با بهینه سازی مبتنی بر فیلترینگ کالمان، نشان داده شده اند.
نشان داده ایم که توابع عضویت یک کنترلر فازی را می توان از طریق فیلترینگ H∞ بهینه سازی نمود. بطور کلی، این روش بهینه سازی باعث بوجود آمدن توابع عضویتی می شوند که نرمال حاصلجمع نیستند؛ یعنی، مقادیر تابع عضویت در هر نقطه از حیطه یا دامنه، به 1 اضافه نمی شوند. بنابراین، الگوریتم فیلترینگ H∞ را تعمیم می دهیم تا اطمینان حاصل کنیم که توابع عضویت حاصل، نرمال حاصلجمع می باشند. این باعث بوجود آمدن یک کنترلر فازی با عملکرد بدتر از توابع عضویت غیرمقید (بطور کلی) می شود اما نرمالی حاصلجمع ممکن است به چند دلیل، مطلوب باشد. روش های بهینه سازی ارائه شده در این پروژه برروی یک کروز کنترلر فازی خودروی شبیه سازی شده، نشان داده شده اند. همانگونه که انتظار می رفت، بهینه سازی غیرمقید باعث عملکرد بهتری نسبت به بهینه سازی مقید شده است. اما همچنین بهینه سازی غیرمقید باعث بدست آمدن توابع عضویت غیرنرمال شده است درحالی که بهینه سازی مقید باعث بوجود آمدن توابع عضویت نرمال حاصلجمع شده است. بطور کلی، فیلترینگ H∞ برای بهینه سازی تابع عضویت فازی باعث عملکرد بهتر نسبت به فیلترینگ کالمان می شود. این قابل انتظار است زیرا فیلتر H∞ برای مدل سازی خطاهای مدل و خطاهای خطی سازی نسبت به فیلترینگ کالمان، مقاوم تر است. فیلترینگ H∞ و کالمان، هر دو به مقادیر پارامترهای قابل میزان شان و به شرایط اولیه، حساس هستند. آنها را باید به عنوان روش های «میزان دقیق» در نظر گرفت، نه روش های بهینه سازی سراسری. بهینه سازی اولیه را می توان با یک روش سراسری تر، مانند روش های «بدون مشتق»، انجام داد. بعد از اینکه روش بهینه سازی سراسری، همسایگی عمومی پارامترهای تابع عضویت بهینه را پیدا کرد، فیلتر H∞ یا فیلتر کالمان را می توان برای میزان سازی دقیق نتایج مورد استفاده قرار داد. پروژه های بعدی می توانند بر خواص همگرایی فیلتر H∞ و فیلتر کالمان در این کاربرد (برای مثال، دنبال کردن خطوط)، اثر پارامترهای قابل میزان فیلترها، بهینه سازی سیستم های فازی با توابع عضویت غیرمثلثی یا تعمیم کار به دیگر طرح های مبتنی بر مشتق (برای مثال، فیلترینگ بدون ردیابی (unscented)) برای بهینه سازی توابع عضویت فازی، تمرکز کنند.
این شبیه سازی در نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است. همچنین مراحل کامل شبیه سازی و توضیحات مربوط به آنها در قالب یک فایل گزارشکار آماده شده که با خرید محصول می توانید آنها را مطالعه نمایید.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.