دانلود شبیه سازی مقاله روش کنترل تطبیقی ساده برای ردیابی مسیر ربات متحرک
| عنوان فارسی |
روش کنترل تطبیقی ساده برای ردیابی مسیر ربات غیرخانگی متحرک الکتریکی |
| عنوان انگلیسی |
A Simple Adaptive Control Approach for Trajectory Tracking of Electrically Driven Nonholonomic Mobile Robots |
| کلمات کلیدی |
دینامیک actuator، کنترل تطبیقی، طراحی سطح پویا، ربات های متحرک غیرخانگی، دینامیک ربات، سینماتیک ربات. |
| درسهای مرتبط |
کنترل تطبیقی، کنترل غیر خطی، سیستم کنترل |
| تعداد صفحات انگلیسی : 8 | نشریه : IEEE |
| سال انتشار : 2010 | تعداد رفرنس مقاله : 30 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Control Systems Technology |
| ترجمه: ندارد | گزارشکار : این محصل دارای یک فایل ورد 4 صفحه ای شامل توضیحات مربوط به شبیه سازی می باشد | شبیه سازی : یک ام فایل و یک فایل سیمولینک متلب |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل تطبیقی ربات متحرک
کنترل ربات های متحرک به دلیل ماهیت محدودیت های غیرخطی به عنوان یک مشکل اصلی در سیستمهای کنترلی جدید در نظر گرفته شده است. بسیاری از تلاش ها برای کنترل ردیابی روبات های غیرخانگی متحرک صورت گرفته است. اکثر این طرح ها دینامیکی ناشی از موتورهای الکتریکی را نادیده می گیرند که باید برای اجرای روبات های متحرک در محیط واقعی، یعنی مدل ربات موبایل در سطح سینماتیک و یا در سطح دینامیکی مورد توجه قرار گیرد. به خوبی شناخته شده است که پویایی محرک بخش مهمی برای طراحی دینامیک کامل ربات است، به ویژه در مورد حرکت با سرعت بالا و بارهای بسیار متغیر. بنابراین، برخی از نتایج به دست آمده برای روبات های متحرک با استفاده از دینامیک محرک در مقالات قبلی نشان داده شده است.
تقریبا تمام کنترل کننده های موجود برای ربات های غیرخانگی متحرک بدون در نظر گرفتن دینامیک محرک طراحی شده اند. این به این دلیل است که حضور دینامیک محرک پیچیدگی دینامیک سیستم را افزایش می دهد و طراحی کنترل کننده را دشوار می سازد. در این مقاله، یک رویکرد کنترل تطبیقی ساده برای ردیابی مسیر نامطلوب روباتهای غیرخانگی همراه با دینامیک محرک ارائه شده است. تمام پارامترهای سینماتیک ربات، دینامیک ربات و دینامیک محرک، نامشخص است. برای طراحی کنترل کننده ساده، روش کنترل سطح پویا به روبات های موبایل اعمال می شود که تعداد ورودی ها و خروجی ها متفاوت است. همچنین روش کنترل تطبیقی را برای درمان تمام عدم اطمینان و قوانین انطباق از تئوری ثبات Lyapunov در نظر گرفته شده است. در نهایت، نتایج شبیه سازی اثربخشی کنترل کننده پیشنهادی را نشان می دهد.
بلوک کنترلر از دوبخش مدل مرجع و کنترلر تطبیقی تشکیل شده است. مدل مرجع مسیر مورد نظر ربات را مشخص می کند و کنترلر تطبیقی ورودی مورد نظر جهت پیمودن این مسیر را ایجاد می کند.
شبیه سازی های این مقاله در متلب صورت گرفته است و در ادامه بخشی از نتایج شبیه سازی ها نشان داده شده است.
روش کنترل تطبیقی ساده برای ردیابی مسیر ربات

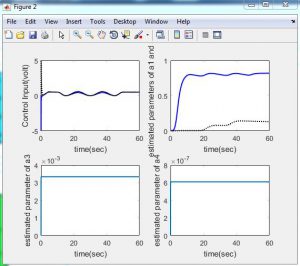
نکته مهم: ممکن است در بعضی از اشکال بین نتایج شبیه سازی و نتایج بدست آمده در مقاله اختلاف اندکی مشاهده شود که دلیل آن پارامترهای ناقص ارائه شده برای شبیه سازی مقاله است.

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.