
دانلود شبیه سازی مقاله مدلسازی ماشین القایی اشباع شده بر اساس تزریق سیگنال
| عنوان فارسی |
مدلسازی ماشین القایی اشباع شده بر اساس تزریق سیگنال فرکانس بالا |
| عنوان انگلیسی |
Saturated Induction Machine Modelling Based on High Frequency Signal Injection |
| کلمات کلیدی |
ماشین القایی؛ مدلسازی؛ هارمونیک سوم؛ تزریق سیگنال |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 6 | نشریه : EA4EPQ |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 10 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Renewable Energies and Power Quality (کنفرانس بین المللی انرژی های تجدیدپذیر و کیفیت توان) |
| ترجمه: ندارد | گزارشکار : دارد (فایل راهنمای 11 صفحه ای) | شبیه سازی : دارد (1 فایل متلب با فرمت .m و 3 فایل متلب با فرمت .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه مدلسازی ماشین القایی اشباع شده
ماشین های القایی، استفاده گسترده ای در کاربردهای صنعتی که دربرگیرنده تبدیل انرژی الکترومکانیکی بخاطر صفات مطلوبشان مانند هزینه کم، اندازه معقول، استواری (در برابر تغییرات پارامتر) و نیاز کم به تعمیر و نگهداری می باشند، دارند. بسیاری از این کاربردها نیاز به استفاده از درایوهای سرعت تنظیم پذیر و یک سیستم کنترل مناسب که دامنه عملیاتی زیاد و عملکرد دینامیک خوب فراهم می کند، دارند. پراستفاده ترین روش، کنترل های جهت میدان و کنترل گشتاور مستقیم می باشند. پیاده سازی هر دو الگوریتم کنترل، نیاز به داشتن دانش در مورد موقعیت روتور و زاویه شار که معمولاً بوسیله یک حسگر محور مکانیکی بدست می آیند، دارد. مزیت های هزینه ای و قابلیت اطمینان حذف حسگرهای مکانیکی و کابل کشی برای اندازه گیری موقعیت، سرعت و شار باعث انجام پژوهش های فراوان شد و در نتیجه، کنترلی به نام کنترل «بدون حسگر» یا «خود حس کننده» ماشین القایی، ابداع شد. کنترل برداری بدون حسگر در منطقه سرعت کم و صفر را نمی توان با استفاده از اطلاعات بدست آمده از یک مدل ماشین تحریک شده متداول در فرکانس استاتور انجام داد. در فرکانس نزدیک به صفر، افت ولتاژ برروی مقاومت استاتور را نمی توان نادیده گرفت، درحالی که emf بازگشتی، بطور پیوسته کاهش می یابد و باعث از بین رفتن هرگونه امکان داشتن بهره برداری سرعت کم یا صفر پیوسته شود و در نتیجه کاربرد ناظرهای شار متداول محدود می شود. تزریق سیگنال های فرکانس بالا، یکی از فنون بسیار مطالعه شده برای کنترل بدون حسگر ماشین ac در دامنه سرعت صفر می باشد. با استفاده از سیگنال اضافه ای که ماشین را با یک تحریک فرکانس بالای پایدار (0.5 تا 1 کیلوهرتز) بالاتر از فرکانس بنیادی تغذیه می کند، مسئله بوجود آمده بوسیله عدم استفاده از حسگر در دامنه سرعت صفر و پارامترهای وابسته را برطرف می کند. انواع تحریک پیوسته پیشنهادی را می توان به سه دسته اصلی تقسیم بندی کرد. اول، سیگنال حامل فرکانس بالای تزریق (جریان یا ولتاژ تزریق حامل دوار، جریان یا ولتاژ تزریق حامل متناوب) است، سیگنال تزریق شده دوم، سیگنال گذرا (تزریق بردار ولتاژ آزمون برهم نهی شده بر PWM بنیادی)، سومی کلیدزنی PWM استاندارد با بهره گیری از کلیدزنی شکل موج های PWM فرکانس بنیادی می باشند. با افزودن سیگنال فرکانس بالا به تحریک فرکانس بنیادی، یک هارمونیک اضافه در جریان های استاتور بوجود می آورد که سپس چنین هارمونیک هایی برای نظارت بر برجستگی ماشین، تولید شده بوسیله اشباع شار اصلی و بنابراین محاسبه موقعیت شار شکاف هوایی، استفاده می شود. علاوه بر اثرمتقابل بین میدان اصلی و میدان فرکانس بالا، باعث مدولاسیون سطح اشباع در طول مسیر مغناطیش کننده می شود. برای تحلیل این اثرمتقابل، یک مدل اشباع بهینه شده در این پروژه پیشنهاد می شود که در آن مدل اشباع یافته متداول با شامل کردن ضریب اشباع از طریق تفاضل بین شار مغناطش کننده اشباع نشده و اشباع شده، اصلاح می شود. مدل سازی تغییرات شار مغناطیس کننده برای توصیف اشباع کافی نیست، زیرا بخاطر اشباع، شکاف هوا شامل دو مولفه شار فرکانس بنیادی و شار هارمونیک سوم، می شود. بنابراین، برای دستیابی به یک مدل دقیق، باید مولفه هارمونیک سوم را نیز در این مدل شامل کنیم.
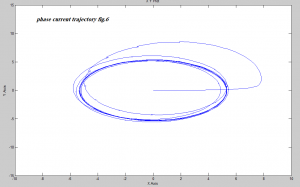
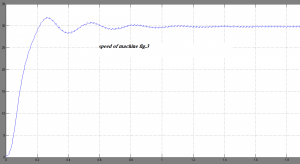
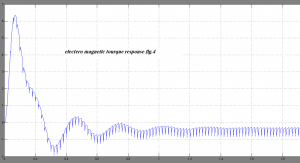
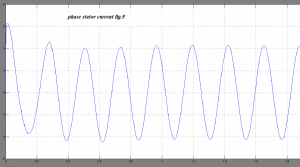
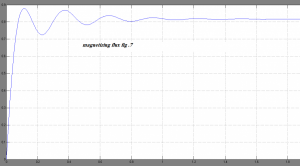
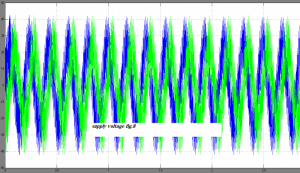
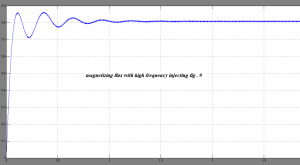
این شبیه سازی در محیط نرم افزار سیمولینک متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:





دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.