دانلود شبیه سازی مقاله مدلسازی D-Q موتور القایی سه فاز با سیمولینک متلب
| عنوان فارسی |
مدلسازی کوادرات مستقیم (D-Q) موتور القایی سه فاز با استفاده از سیمولینک متلب (MatLab / Simulink) |
| عنوان انگلیسی |
Direct Quadrate (D-Q) Modeling of 3-Phase Induction Motor Using MatLab / Simulink |
| کلمات کلیدی |
مدلسازی بار؛ تبدیل d-q؛ موتور القایی؛ گشتاور؛ شار؛ سرعت |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 7 | نشریه : Semantic Scholar |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 7 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Canadian Journal on Electrical and Electronics Engineering (مجله کانادایی مهندسی برق و الکترونیک) |
| ترجمه: دارد (ترجمه 16 صفحه ای در قالب WORD و PDF) | گزارشکار : دارد (گزارشکار این شبیه سازی در قالب یک فایل پاورپوینت 31 اسلایدی تهیه شده است) | شبیه سازی : دارد (یک فایل سیمولینک متلب با فرمت .slx و یک فایل با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
مدلسازی D-Q موتور القایی
در سال های اخیر کنترل درایوهای موتور القایی با کارایی بالا برای کاربردهای عمومی صنعتی و حوزه تولید، مورد توجه بسیاری از تحقیقات قرار گرفته است. مدل سازی ماشین القایی به طور مداوم مورد توجه محققان قرار گرفته است، نه تنها به این دلیل که چنین دستگاه هایی در تعداد زیاد ساخته (یعنی 80٪ از کل بارها) و مورد استفاده قرار می گیرند، بلکه به دلیل حالت های متنوع عملکرد شان که هم در حالت پایدار و هم در حالت دینامیک مورد استفاده قرار می گیرند. مشخص شده است که مشخصات بار تأثیر کافی بر عملکرد سیستم و پایداری گذرا دارد. تاسیسات به دلیل عدم قطعیت ویژگی های بار واقعی، از مدل های دینامیک برای نتیجه دقیق و جامع استفاده می کنند. تلاش های زیادی برای ایجاد روش ساخت مدل های بار بهبود یافته انجام شده است. یکی از حالت های مورد استفاده در این پروژه، اعتبار فرایند مدل سازی بار را بر اساس مولفه هایی نشان می دهد که مدل بار دینامیک را می سازند. هدف اصلی استفاده از رویکرد d-q، کنترل مستقل پارامترهای موتور یعنی گشتاور و شار موتور القایی است.
در این پروژه، یک پیاده سازی سیمولینک مدولار در مدل ماشین القایی بواسطه رویکرد مرحله ای شرح داده شده است. هر بلوک با استفاده از سیستم مدولار، یکی از معادلات مدل را حل می کند. به دلیل این رویکرد، تمام پارامترهای ماشین برای اهداف کنترل و تأیید، قابل ارزیابی هستند. تا زمانی که معادلات شناخته شده باشند، هر الگوریتم درایو یا کنترل را می توان در سیمولینک مدل سازی کرد. با این حال، معادلات همیشه به خودی خود کافی نیستند؛ برای حل معادلات دیفرانسیل به کمی تجربه نیاز است.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:








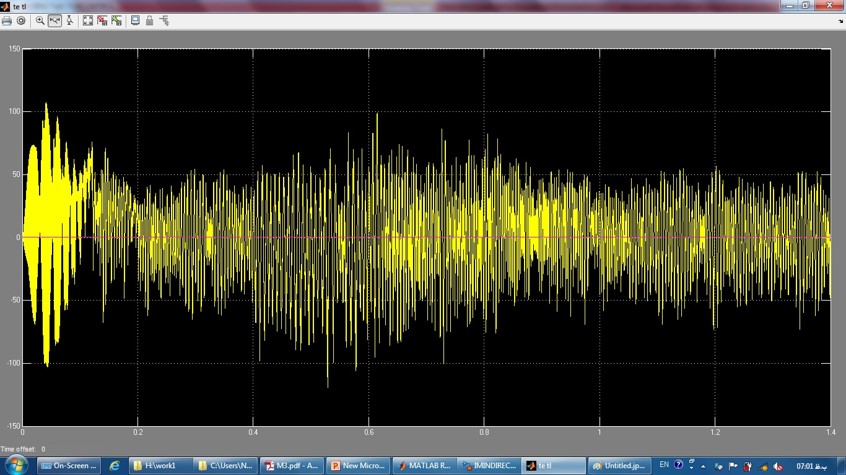
در این پروژه، اجرای مدل سیمولینک مدولار برای شبیه سازی ماشین القایی مطرح شده است. در این مدل، برخلاف بیشتر پیاده سازی های دیگر مدل ماشین القایی، کاربر از همه متغیرهای داخلی برای دریافت بینش در مورد عملکرد دستگاه استفاده می کند. هر الگوریتم کنترل ماشین را می توان بدون استفاده از برآوردگرها، در محیط سیمولینک شبیه سازی کرد. معادلات پارامترهای فردی در هر بلوک حل شده اند. در نهایت، عملکرد مدل، شبیه سازی مدل دینامیکی موتور القایی بواسطه گشتاور و شار به عنوان مقادیر مستقل می باشد. در این پروژه ثابت شده که سیمولینک، یکی از ابزارهای ضروری برای آموزش و تحقیق درایوهای ماشین های الکتریکی می باشد.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.