
دانلود شبیه سازی مقاله مدلسازی موتور BLDC در MATLAB GUI
| عنوان فارسی |
مدلسازی و شبیه سازی موتور BLDC در MATLAB GUI (رابط گرافیکی کاربر) |
| عنوان انگلیسی |
Modeling and Simulation of the BLDC Motor in MATLAB GUI |
| کلمات کلیدی |
موتور DC بدون جاروبک؛ مدل ریاضی؛ موتور مغناطیس دائم؛ روتور؛ رابط گرافیکی کاربر |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 9 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE International Symposium on Industrial Electronics (ISIE) (سمپوزیوم بین المللی الکترونیکی صنعتی) |
| ترجمه: ندارد | گزارشکار : دارد (14 صفحه) | شبیه سازی : دارد (فایل های شبیه سازی در محیط متلب با فرمت .m و .mdl و .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
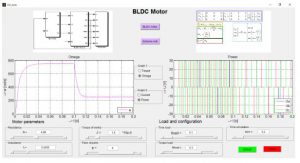
رابط گرافیکی کاربر در متلب (MATLAB GUI)
موتور جریان مستقیم بدون جاروبک (BLDC) در صنایع مختلفی بکار می رود، و از این نظر محبوبیتش سریعاً در حال افزایش است. این موتور برای تولید وسایل خانگی، خودرو، هوافضا، محصولات مصرفی، پزشکی، تجهیزات و ابزارهای اتوماسیون صنعتی کاربرد دارد. همانطوری که از اسمش برمی آید، موتورهای DC بدون جاروبک، برای انجام کموتاسیون نیازی به جاروبک ندارند. بلکه کموتاسیون آن ها به صورت الکترونیکی انجام می شود. موتورهای BLDC، دارای مزایای متعددی نسبت به موتورهای DC دارای جاروبک و موتورهای القایی هستند. تعدادی از این مزایا به شرح زیر هستند:
- مشخصه سرعت- گشتاور مطلوب تر
- پاسخ دینامیک بالا
- بازدهی بالا
- طول عمر اجرایی بلندمدت
- عملکرد بدون صدا
- محدوده سرعتی گسترده تر
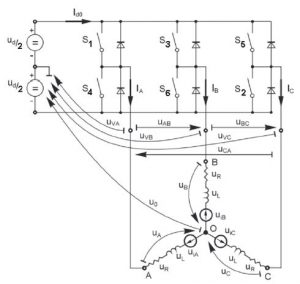
علاوه بر این، نسبت گشتاور به اندازه موتور در حد بالاتری قرار دارد، نتیجتاً این موتورها گزینه مفیدی برای آن دسته از کاربردهایی هستند که وزن و فضا، عوامل اساسی تلقی می شوند. گشتاور موتور BLDC ، عمدتاً تحت تاثیر شکل موج نیروی ضدمحرکه قرار دارد (ولتاژ القا شده در سیم پیچ استاتور ، ناشی از حرکت روتور). در حالت ایده آل، موتورهای BLDC دارای شکل موج های ضدمحرکه ذوزنقه ای هستند ، و جریان های مستطیلی استاتور به آن ها اعمال می شوند. بدین ترتیب از نظر تئوریک، گشتاور ثابتی تولید می شود. البته در واقعیت امر و شرایط اجرایی، ریپل های گشتاور وجود دارند. اصلی ترین دلایل ایجاد این ریپل ها عبارتند از ناقص بودن شکل موج نیروی ضدمحرکه، ریپل جریان، و کموتاسیون جریان فاز. ریپل جریان بدلیل اعمال کنترل PWM یا هیسترزیس شکل می گیرد. ناقص بودن شکل موج نیروی ضدمحرکه بدلیل تغییر در شکل شیار، خمیدگی و آهنربای موتور BLDC پدید می آید. آن ها با توجه به هدف طراحی دستخوش تغییر می شوند. بدین ترتیب خطایی بین مقدار واقعی و نتایج شبیه سازی پدید می آید. چندین مدل شبیه سازی برای تجزیه و تحلیل موتور BLDC پیشنهاد شده اند. یکی از این مدل ها دارای شکل موج ضدمحرکه واقعی است که تا حدود زیادی به شکل موج سینوسی نزدیک است. این پروژه تلاش نموده تا انواع مختلف از مدل های موتور BLDC را با یکدیگر مقایسه بکند. آن ها با شکل موج های ضدنیرومحرکه سینوسی و ذوزنقه ای مقایسه می شوند. مدل ساده موتور BLDC شامل چیدمان 3 فاز تامین برق، و یک موتور DC بدون جاروبک، مطابق شکل زیر است.
روش مدلسازی معرفی شده در این پروژه ، به شبیه سازی انواع مختلف از موتورهای BLDC کمک می کند. نتایج ارزیابی عملکرد نشان می دهند که چنین مدلسازی، قویاً برای مطالعه سیستم راه اندازی، قبل از اجرای طراحی های اختصاصی مفید واقع می شود. در عین حال پارامترهای دینامیک مرتبط با موتور، همگی در تحلیل ها لحاظ می شوند.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های آن قرار داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.