دانلود شبیه سازی مقاله موتور سنکرون مغناطیس دائم با کنترل کننده سرعت درجه دوم خطی
| عنوان فارسی |
موتور سنکرون مغناطیس دائم با کنترل کننده سرعت درجه دوم خطی |
| عنوان انگلیسی |
Permanent Magnet Synchronous Motor with Linear Quadratic Speed Controller |
| کلمات کلیدی |
موتور سنکرون مغناطیس دائم (PMSM)؛ تنظیم کننده درجه دوم خطی (LQR)؛ کنترل کننده PID؛ سیمولینک |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 6 | نشریه : ELSEVIER |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 9 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |
| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Energy Procedia (پروسدیا انرژی) |
| ترجمه: ندارد | گزارشکار : دارد (18 صفحه) | شبیه سازی : دارد (فایل های شبیه سازی در متلب با فرمت .slx و .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل کننده سرعت درجه دوم خطی
در این پروژه، نظریه کنترل برداری، و کاربرد آن جهت کنترل ماشین سنکرون مغناطیس دائم [PMSM] به بحث گذاشته شده است. بخاطر نظریه کنترل برداری است که عملکرد درایو سروو PMSM، در حد عملکرد درایوهای DC قرار می گیرد، یا از آن ها فراتر می رود. نظریه کنترل برداری، با کمک اصول تبدیل کلارک و پارک، جریان سه فاز واقعی را به جریان گشتاور و جریان میدان متناظر تبدیل می کند. با انجام این عمل، مدل کنترل ریاضیاتی PMSM تجویززدایی می شود. با توجه به اینکه موتور PMSM در حال جایگزین سازی موتور DC متداول برای سیستم کنترل سرعت متغیر با توان خروجی اسمی کوچک است، لذا باید عملکرد PMSM، که به پاسخ گذرای سریع نیاز دارد، تا حد امکان ارتقا پیدا بکند. کنترل کننده PID، نقش غالب و فراگیر را در سیستم کنترل PMSM، علی الخصوص در کاربردهای واقعی بر عهده گرفته است. این در حالیست که عملکرد PMSM مبتنی بر کنترل کننده PID، همواره در سطح رضایت بخشی قرار ندارد. بدین ترتیب روش های جایگزینی همچون تنظیم کننده خطی – تربیعی / درجه 2 (LQR)، جهت کنترل سرعت PMSM مورد بهره برداری قرار گرفته اند. LQR یک استراتژی کنترلی بهینه است که از تابع هزینه درجه 2، جهت تعیین عملکرد کنترلی اش استفاده می کند. به منظور اعمال LQR به سیستم کنترل سرعت PMSM، در وهله اول باید نسبت به خطی سازی مدل ریاضیاتی اصلی و غیرخطی PMSM اقدام بشود. بدین ترتیب از روش خطی سازی استفاده می شود.
در این پروژه، مدل ریاضیاتی سیستم دینامیک PMSM تنظیم شده است. با توجه به ماهیت غیرخطی و تزویج متقابل این سیستم، با تعریف متغیرهای جدید و اعمال رویکرد کنترل برداری، یک مدل خطی سازی شده پیشنهاد می شود. در این روش مقدار Id روی صفر حفظ می شود. محققان استراتژی کنترلی LQR را بررسی نمودند. عملکرد کنترلی آن با کنترل کننده متداول PID، نسبت به یک سیستم PMSM دینامیک مقایسه شده است. این عمل به کمک محیط سیمولینک در نرم افزار متلب انجام گرفته است. نتایج شبیه سازی ها تایید کننده متدولوژی LQR پیشنهادی هستند.ضمناً عملکرد دینامیک آن، از نظر زمان گذار، و اورشوت سرعت در حد بهتری قرار گرفته است. همچنین متدولوژی کنترلی LQR، در مقایسه با کنترل کننده سنتی PID، عملکرد بهتری را بجا می گذارد.
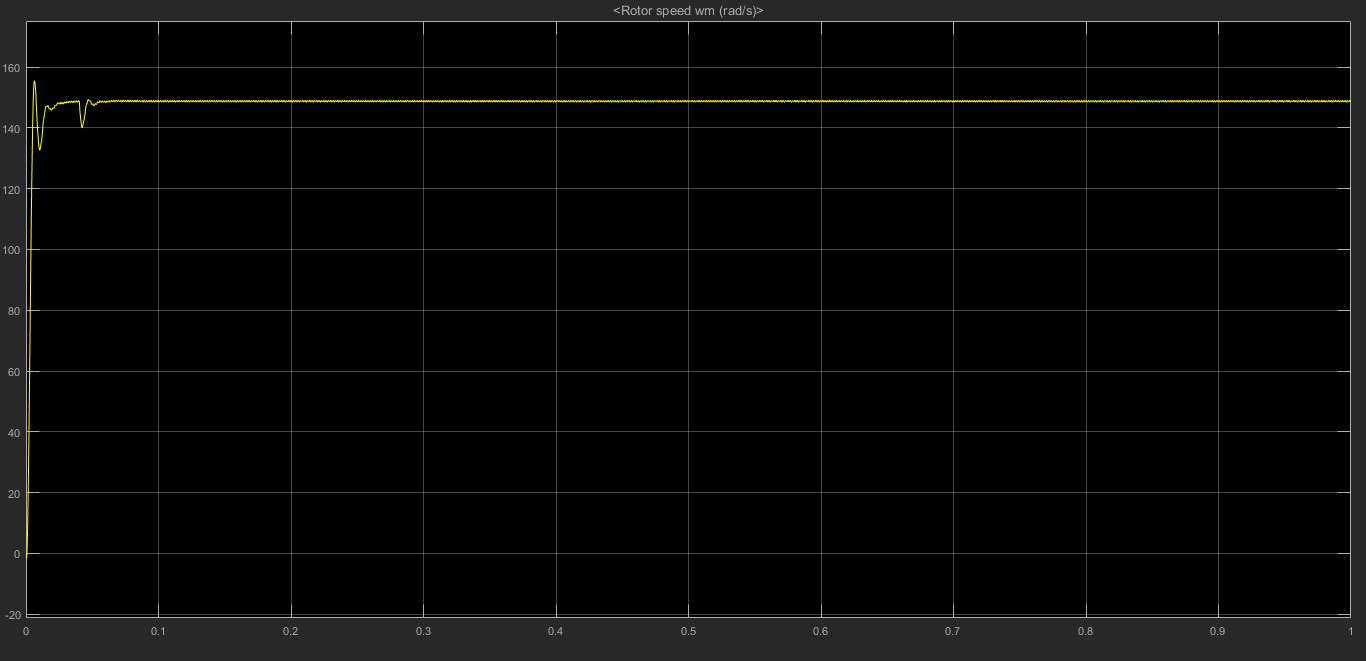
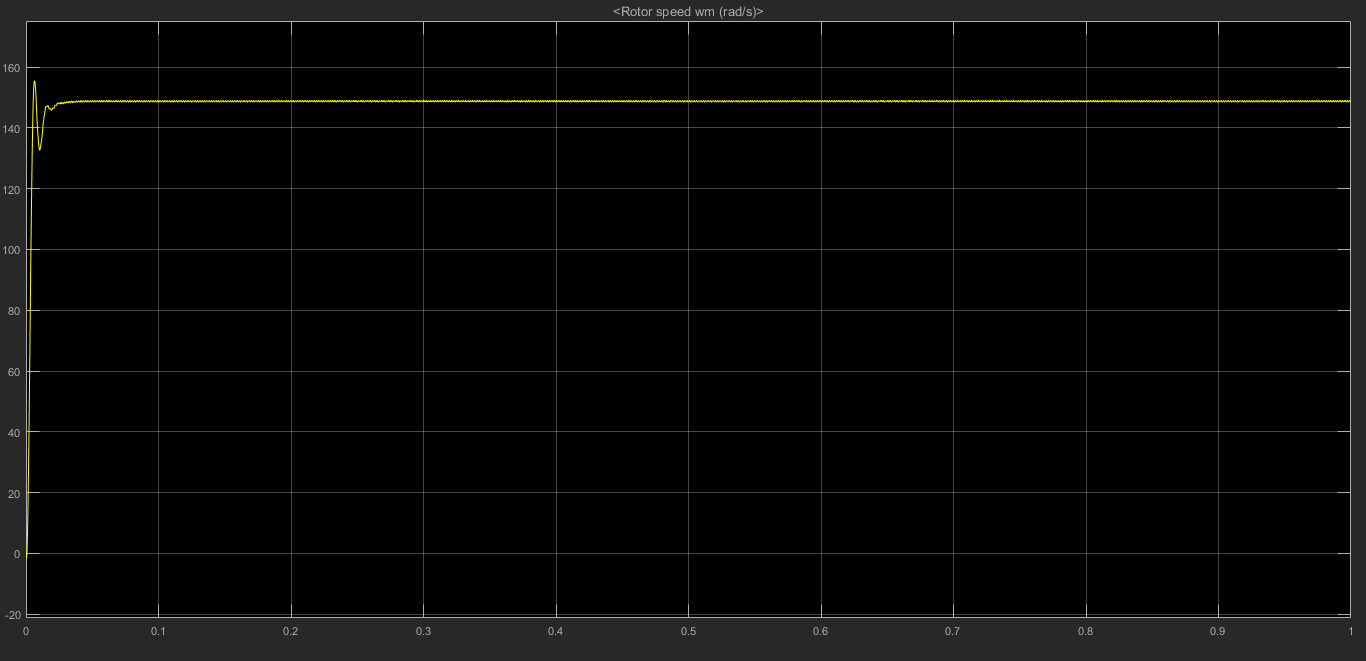
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.