
دانلود شبیه سازی مقاله کنترل بهینه آونگ معکوس دوگانه با کنترل کننده LQR
| عنوان فارسی |
کنترل بهینه آونگ معکوس دوگانه با استفاده از کنترل کننده LQR |
| عنوان انگلیسی |
Optimal Control of Double Inverted Pendulum Using LQR Controller |
| کلمات کلیدی |
آونگ معکوس دوگانه؛ نرم افزار متلب (MATLAB)؛ تنظیم کننده خطی درجه دوم؛ عملکرد سیستم |
| درسهای مرتبط |
کنترل مدرن |
| تعداد صفحات انگلیسی : 4 | نشریه : IJARCSSE |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 10 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله (این محصول دارای پاورپوینت 23 اسلایدی برای ارائه کلاسی هست) |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Advanced Research in Computer Science and Software Engineering (مجله بین المللی تحقیقات پیشرفته در علوم کامپیوتر و مهندسی نرم افزار) |
| ترجمه: دارد (ترجمه 12 صفحه ای در قالب WORD و PDF) | گزارشکار : دارد (26 صفحه به صورت WORD و PDF) | شبیه سازی : دارد (2 فایل شبیه سازی در متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب آونگ معکوس دوگانه
سیستم پاندول، یکی از مسائل کلاسیک در مورد کنترل غیرخطی و یک ضابطه مناسب برای بهره گیری از سیستم های مکانیکی می باشد. پاندول معکوس دوبل، یک مدل نوعی از یک سیستم چند متغیری، غیرخطی و اساساً ناپایدار می باشد که یک تجهیز آزمایشی کامل نه تنها برای آموزش بلکه برای پژوهش می باشد، زیرا مفاهیم انتزاعی بسیاری از نظریه کنترل را می توان بوسیله آزمایش های مبتنی بر این سیستم، نشان داد. این روش، بخاطر غیرخطی و ناپایدار بودنش، روشی مفید برای تست الگوریتم های کنترلی (مانند کنترل های PID، شبکه عصبی، کنترل فازی، الگوریتم ژنتیک و غیره) می باشد. در سال 1972، دو پژوهشگر در حوزه کنترل، با استفاده از یک کامپیوتر آنالوگ، موفق به کنترل یک پاندول معکوس در موقعیت ایستا برروی یک کالسکه شدند که بوسیله نیروی افقی تثبیت شده بود. انواع مختلفی از پاندول معکوس وجود دارد که می توان حالت ساده، حالت دوار، حالت مضاعف و حالت مضاعف دوار را نام برد. پژوهش های انجام شده برروی چنین سیستم پیچیده ای شامل مسائل نظری مهم بسیاری در مورد کنترل سیستم، همانند مسائل غیرخطی، استواری، توانایی و ردیابی، می باشد. بنابراین، به عنوان یک مثال مطالعه ای ایده آل، سیستم پاندول معکوس در سیستم کنترل مورد توجه جهانی قرار گرفت و به عنوان یک نظریه کنترل، بخصوص پژوهش های نظریه کنترل مدرن و تجهیزات تست کننده، شناخته شده است. بنابراین، نه تنها بهترین ابزار تجربی بلکه همچنین یک پلتفرم تجربی ایده آل است. پژوهش های انجام شده برروی این موضوع، معنای عمیقی در نظریه و روش تحقیق دارند و ارزش آن توسط دانشمندان کشورهای مختلف، درک شده است.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی، قرار داده شده است:
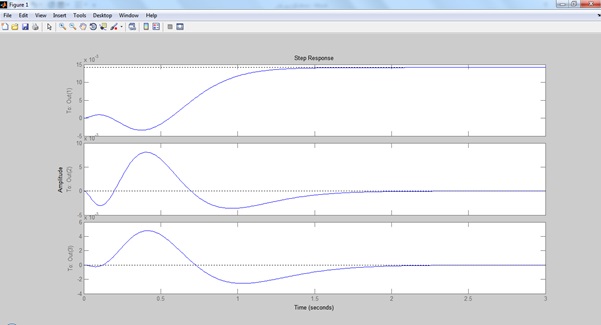
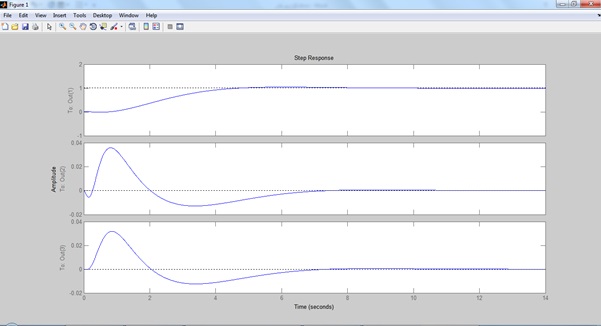
در این پروژه، یک کنترلر مبتنی بر LQR با موفقیت برای سیستم پاندول معکوس دوبل، طراحی شده است. نتایج شبیه سازی مربوط به سیستم براساس پاسخ پله نیز برای این سیستم بدست آمده اند. در این مقاله، این فنون مورد استفاده برای کاهش زمان نشست و اوج سیستم، به بحث گذاشته می شوند.


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.