دانلود شبیه سازی مقاله کنترل زمان واقعی آونگ معکوس با منطق فازی
| عنوان فارسی |
کنترل زمان واقعی آونگ معکوس با استفاده از منطق فازی |
| عنوان انگلیسی |
Real-Time Controlling of Inverted Pendulum by Fuzzy Logic |
| کلمات کلیدی |
آونگ معکوس؛ مدل ریاضیاتی؛ کنترل فازی؛ زمان واقعی |
| درسهای مرتبط |
کنترل مدرن |
| تعداد صفحات انگلیسی : 4 | نشریه : IEEE |
| سال انتشار : 2009 | تعداد رفرنس مقاله : 6 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE International Conference on Automation and Logistics (کنفرانس بین المللی اتوماسیون و لجستیک) |
| ترجمه: دارد (ترجمه 12 صفحه ای در قالب word و pdf) | گزارشکار : دارد (13 صفحه به صورت word و pdf) + فیلم آموزشی 2 دقیقه ای که نحوه اجرای شبیه سازی ها را نشان داده است | شبیه سازی : دارد (دو فایل شبیه سازی در سیمولینک متلب با فرمت .slx و یک فایل فازی با فرمت .fis) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب کنترل آونگ معکوس
سیستم پاندول معکوس، به عنوان یک سیستم غیرخطی ناپایدار معمول، اغلب به عنوان یک معیار برای تایید عملکرد و اثربخشی یک روش کنترل جدید مورد استفاده می گیرد که علت آن، سادگی ساختاری آن است. کنترل پایدار کننده پاندور معکوس، جهت ایجاد تعادل در پاندول در موقعیت سرپا می باشد. این مسئله، یک مسئله کنترل غیرخطی بسیار معمول و آکادمیک است و فنون بسیاری برای حل آن، ارائه شده است، که می توان کنترل مبتنی بر مدل، کنترل فازی، کنترل شبکه عصبی (NN)، کنترل مبتنی بر الگوریتم های ژنتیک (GA) و غیره را نام برد. با این حال، این کنترلر نمی تواند بطور کامل یک سیستم پاندول را در یک مدت زمان کوتاه، پایدار کند. در این پروژه، یک مدل فازی تاکاگی-سوگنو مبتنی بر داده، به نام ANFIS برای کنترل پایدار کننده بکار گرفته می شود و یک سیستم تست شبیه سازی نیمه فیزیکی برای پاندول معکوس خطی مورد مطالعه قرار می گیرد و سپس با استفاده از نظریه نیمه فیزیکی، ساخته می شود. فنآوری نمونه اولیه سازی سریع، از بهره برداری نرم افزاری، توسعه سخت افزاری و طراحی و محقق سازی الگوریتم تشکیل شده که اینها، روشی برای کمک به توسعه سریع، فراهم می کنند.
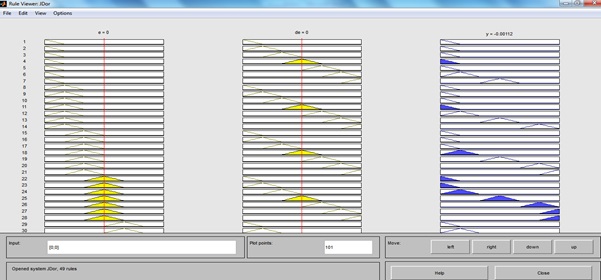
پاندول معکوس، یک سیستم ناپایدار با تزویج قوی غیرخطی چند متغیری معمول می باشد. هدف اصلی مقاله حاضر، متعادل سازی یک پاندول واقعی در موقعیت خود در مرکز مسیر می باشد. به این منظور، از کنترلر منطق فازی استفاده کردیم. این کنترلر منطق فازی در محیطی متلب/سیمولینک طراحی شده است. در این مقاله، مدل ریاضیاتی پاندول ساخته می شود. همچنین، سخت افزار مبتنی بر متلب در سیستم شبیه سازی حلقه ای طراحی می شود. علاوه بر آن، یک طرح کنترل فازی خبره نوین پیشنهاد می شود. طرح کنترل پیشنهادی در متلب پیاده سازی شده و عملکرد خوبی در کنترل فازی بلادرنگ پاندول معکوس، نشان داد. نتایج شبیه سازی و اجرای تجربی نشان دادند که روش کنترل پیشنهادی، عملکرد کنترلی قوی دارد.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصاویر مربوط به محیط شبیه سازی و خروجی های آن، قرار داده شده اند:
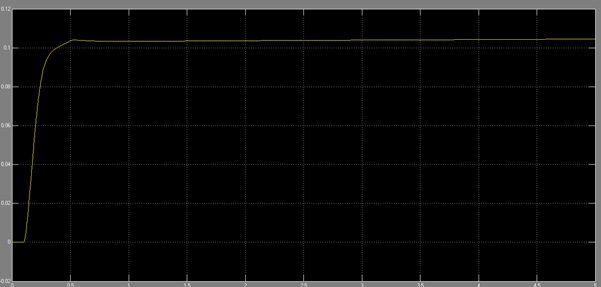
هدف این پروژه، طراحی یک کنترلر تثبیت کننده برای پاندول معکوس است و با موفقیت به این هدف رسیدیم. ثابت شده که این کنترلر فازی در کنترل زاویه ای پاندول در موقعیت سرپا و کنترل موقعیتی کالسکه نسبت به مبداء ریل، موثر و کارآمد است. بخاطر پیچیدگی این سیستم و الزامات بلادرنگ، سخت افزار مبتنی بر متلب در شبیه سازی حلقه ای برای حل این مسئله مورد استفاده قرار می گیرد. اثر این کنترل را می توان به آسانی از نتایج شبیه سازی و اجرای تجربی، مشاهده نمود.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.