
دانلود شبیه سازی مقاله طراحی کنترل کننده بهینه خطی درجه دوم برای ربات دوچرخه
| عنوان فارسی |
طراحی کنترل کننده بهینه خطی درجه دوم برای ربات دوچرخه |
| عنوان انگلیسی |
Design of Linear Quadratic Optimal Controller for Bicycle Robot |
| کلمات کلیدی |
ربات دوچرخه؛ مدل دینامیکی خطی؛ مدل زمان گسسته؛ کنترل بهینه درجه دوم خطی؛ شبیه سازی کامپیوتری |
| درسهای مرتبط |
کنترل مدرن |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2009 | تعداد رفرنس مقاله : 6 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE International Conference on Automation and Logistics (کنفرانس بین المللی اتوماسیون و لجستیک) |
| ترجمه: دارد (ترجمه 14 صفحه ای در قالب WORD و PDF) | گزارشکار : دارد (گزارشکار و توضیحات مربوط به شبیه سازی در دو فایل 9 صفحه ای و 16 صفحه ای به صورت فایل WORD و PDF) | شبیه سازی : دارد (فایل های شبیه سازی در متلب با فرمت .m و .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب کنترل کننده خطی درجه دوم
در زمینه کنترل ربات، ربات دوچرخه سوار، یک مسئله پژوهشی داغ است که این به خاطر ویِژگی ناپایدار از لحاظ استاتیکی و پایدار از لحاظ دینامیکی می باشد. همچنین، پژوهش های بسیاری برای مطالعه مسئله خود توازن ربات دوچرخه سوار، انجام شده اند. چندین نوع مدل دینامیک ربات دوچرخه سوار توسط تعدادی از پژوهشگران ارائه شده است. در این پروژه، یک نوع مدل دینامیکی دوچرخه براساس توازن ممان اینرسی، پیشنهاد می شود. سپس، مدل دینامیکی توصیف شده با یک معادله دیفرانسیل غیرخطی با روش خطی سازی تقریبی، ارائه می شود.
مدل دینامیکی ربات دوچرخه سوار، هنگام حرکت در سرعت بالا با یک مدل خطی مشابه می شود. با هدف ایجاد تعادل در ربات دوچرخه سوار با سرعت بالا، یک نوع مدل دینامیکی خطی مربوط به آن براساس یک مدل دینامیکی غیرخطی از این ربات ارائه شد. سپس، پایداری حلقه باز براساس مدل دینامیکی خطی، تحلیل شد و کنترل پذیری و مشاهده پذیری مدل دینامیکی خطی تایید شد. سپس، مدل زمان گسسته آن براساس مدل خطی زمان پیوسته، ارائه شد. سپس، یک کنترلر بهینه درجه دوم خطی براساس نظریه کنترل خطی برای مدل دینامیکی خطی ربات دوچرخه سوار، طراحی شد. نتایج شبیه سازی کامپیوتری، کارایی و اثربخشی این الگوریتم کنترل را نشان می دهند. استفاده از آن در آینده در آزمایش های تجربی حالت واقعی، امکان پذیر خواهد بود.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصاویر مربوط به خروجی های شبیه سازی، قرار داده شده است:
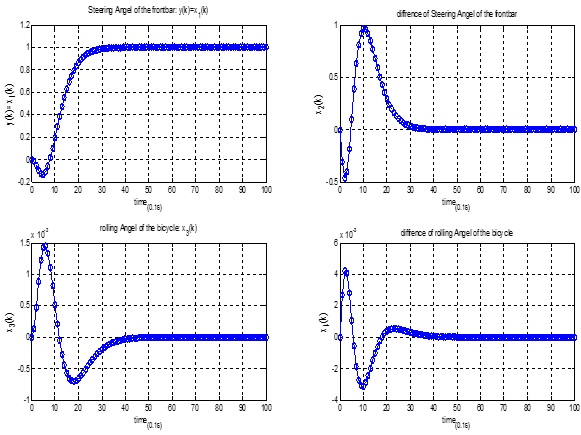
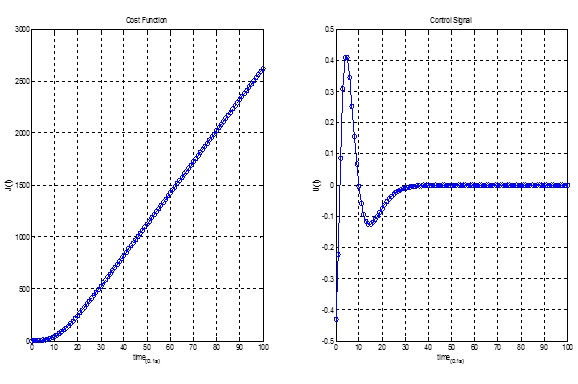
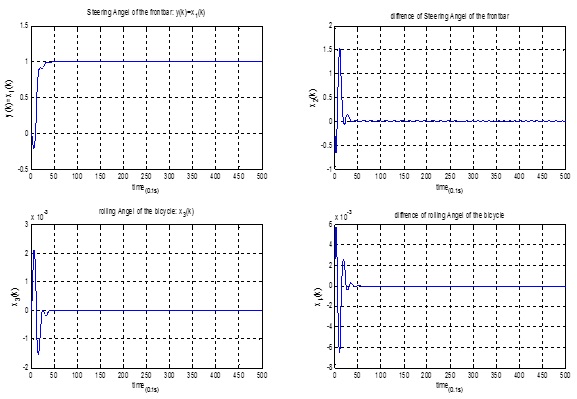
شبیه سازی های انجام شده در این پروژه نشان می دهد که الگوریتم ارائه شده می تواند ربات را در زاویه ای مشخص، در حالت پایدار نگه دارد. نتایج شبیه سازی مطابق با حس فیزیکی ربات دوچرخه واقعی است که با سرعت بالا در حال حرکت می باشد. لازم به ذکر است که کنترل کننده بهینه درجه دوم خطی نیز دارای مشخصه های پایداری جهانی است.

نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.