
دانلود شبیه سازی مقاله طراحی کنترل کننده سرعت فازی-عصبی برای سیستم الکترومکانیکی
| عنوان فارسی |
طراحی کنترل کننده سرعت فازی-عصبی تطبیقی برای یک سیستم الکترومکانیکی |
| عنوان انگلیسی |
Design adaptive neuro-fuzzy speed controller for an electro-mechanical system |
| کلمات کلیدی |
استنتاج فازی-عصبی تطبیقی؛ مدار چاپر؛ SEDM؛ کنترل سرعت |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 9 | نشریه : ELSEVIER |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 13 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Ain Shams Engineering Journal (مجله مهندسی عین الشمس) |
| ترجمه: ندارد | گزارشکار : دارد (گزارشکار 27 صفحه ای در قالب فایل ورد که به توضیحات کامل مربوط به شبیه سازی پرداخته است) (یک فیلم دو دقیقه ای نیز آماده شده که با مشاهده آن می توانید با نحوه ران کردن شبیه سازی آشنا شوید) | شبیه سازی : دارد (دو فایل سیمولینک متلب با فرمت .slx و یک فایل فازی با فرمت .fis) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل کننده سرعت فازی-عصبی
موتورهای جریان مستقیم (DC)، به طور گسترده در بسیاری از کاربردهای صنعتی از جمله خودروهای الکتریکی، کارخانجات نورد فولاد، جرثقیل های الکتریکی، و ابزارهای کاربردی رباتیک بکار رفته اند. آن ها دارای قابلیت های کنترلی دقیق، همه جانبه، ساده، و پیوسته ای هستند. بنابراین محققان مثال فعلی راجع به اهمیت این موتورها را بررسی نموده اند. آن ها تلاش نموده اند به شیوه های مختلف، مشکلات پیش روی این موتورها را حل بکنند. به طور سنتی، روش کنترل آرمیچر به صورت فراگیر برای کنترل سرعت موتورهای DC سرعت پایین بکار گرفته می شد. این در حالیست که کنترل پذیری، ارزانی، بازدهی زیاد و قدرت بالای حمل جریان در مبدل های توان استاتیک، تحول اساسی را در عملکرد درایوهای الکتریکی ایجاد نموده است. استفاده از کنترل کننده های مشتق گیر- انتگرالی تناسبی سنتی (PI)، می تواند به دستیابی به مشخصه گشتاور- سرعت مدنظر کمک بکند. علت این است که کنترل کننده های PID به مدل ریاضیاتی دقیق نیاز دارند. سیستم استنتاج فازی- عصبی تطبیقی (ANFIS)، که در دهه 1980 توسط جانگ پیشنهاد شد، مفاهیم منطق فازی و شبکه های عصبی را در یکدیگر تلفیق می کند. بدین ترتیب یک سیستم هوشمند فراهم می شود، چنین سیستمی این قدرت را دارد که سیستم های هیبرید را تحت یادگیری و انطباق دهی خودکار قرار بدهد. چنین سیستم هایی توسط محققان برای مدلسازی و پیش بینی در مسائل مختلف مهندسی بکار می روند. ایده اصلی حاکم بر تکنیک های یادگیری عصبی- تطبیقی، فراهم سازی قدرت یادگیری اطلاعات از روی مجموعه داده ها، و انجام مدلسازی های فازی مربوطه است. با انجام این عمل،بهترین پارامترهای تابع عضویت، که به سیستم استنتاج فازی این امکان را داده تا داده های ورودی/ خروجی را ردیابی بکنند، به صورت خودکار محاسبه می شوند. تنظیم پارامترهای تابع عضویت، به کمک ترکیبی از روش تخمین حداقل مربعات، و الگوریتم پس انتشار صورت می گیرد. پارامترهای مربوط به توابع عضویت، در طول یادگیری دستخوش تغییر می شوند. انجام این کار دقیقاً مشابه روال طی شده در شبکه عصبی است. تنظیم پارامترها بوسیله بردار گرادیان تسهیل می شود. بردار گرادیان نشان داده که عملکرد FIS برای مدلسازی داده های ورودی/ خروجی، از روی مجموعه مشخصی از پارامترها در چه حدی قرار دارد. به محض بدست آوردن بردار گرادیان، می توان یک مورد از چندین روش بهینه سازی موجود را برای تنظیم خروجی ها اعمال نمود. بدین ترتیب میزان خطای ایجاد شده بین داده های واقعی و مطلوب به حداقل می رسد. این شرایط به سیستم فازی این امکان را می دهد تا از روی داده های در حال مدلسازی، اطلاعاتی را یاد بگیرد. مزیت این رویکرد، نسبت به پارادایم فازی خالص / مطلق این است که نیاز به عامل انسانی جهت تنظیم سیستم، و تغییر مرزهای تابع عضویت برطرف می شود. برای کنترل سرعت موتور DC، یک سیستم کنترل حلقه باز با موفقیت طراحی و پیاده سازی شده است. چنین سیستمی قادر به پیش بینی رفتار دینامیک سیستم هاییست که از ماژول های مکانیکی و الکترونیکی تشکیل شده است. عملکرد برتر کنترل کننده های مبتنی بر هوش مصنوعی (AI)، مهندسان سیستم های قدرت و الکترونیک قدرت را مجبور کرده است تا مدارات متداول کنترل سرعت را با کنترل کننده های سرعت هوشمند جایگزین بکنند.
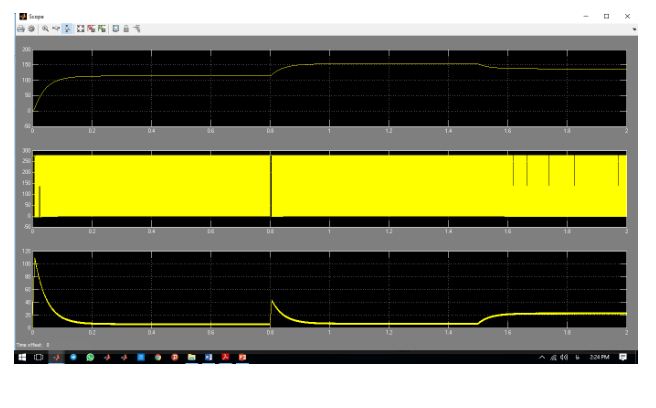
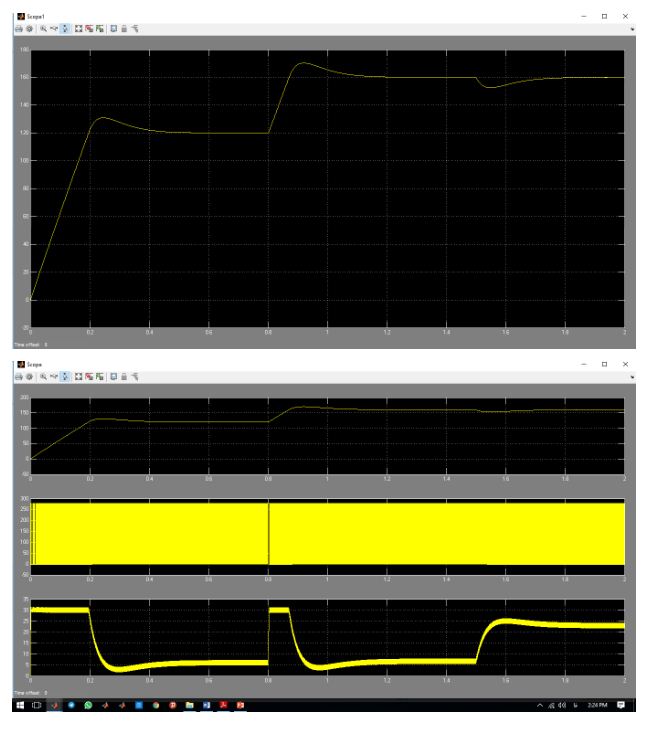
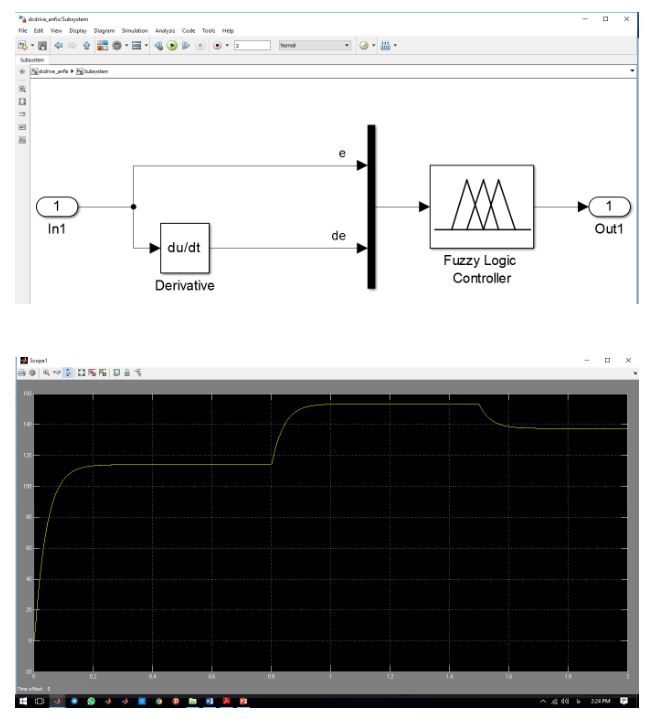
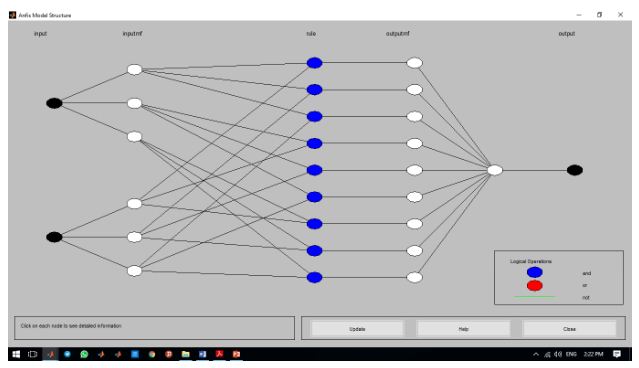
محققان با استفاده از متلب، سیستم کنترل سرعت مبتنی بر کنترل کننده ANFIS را توسعه داده اند. چنین سیستمی قادر به کنترل سرعت موتور DC با تحریک جداگانه است. این پروژه زمینه و اصول بکارگیری کنترل کننده ANFIS، به منظور کنترل یک موتور DC با تحریک جداگانه را بنا نهاده است. همچنین راجع به اثرات افزایش دما بر مقاومت آرمیچر موتور DC، و اثرش بر سرعت بحث شده است. عملکرد سیستم، با کنترل کننده سنتی PI، و کنترل کننده PID فازی با تنظیم کنندگی خودکار مقایسه شده است. مدل ANFIS، واکنش سرعت بهتری را نسبت به سایر تکنیک های مورد اشاره فراهم می سازد. عملکرد سیستم پیشنهادی بوسیله شبیه سازی ها تست شده است. تعداد ریپل ها، خطای حالت پایدار کاهش، زمان افزایش کاهش یافته اند، ضمناً با هیچگونه اورشوتی روبرو نیستیم. علاوه بر این، کنترل کننده ANFIS، تنظیم سرعت را در زمان کمتری در مقایسه با کنترل کننده FIPD و سایر کنترل کننده های مورد اشاره انجام می دهد. واقعیت امر این است که کنترل کننده سرعت ANFIS پیشنهادی، عملکرد و واکنش حالت های گذرا و پایدار را نسبت به کنترل کننده PI معمولی ارتقا می دهد.
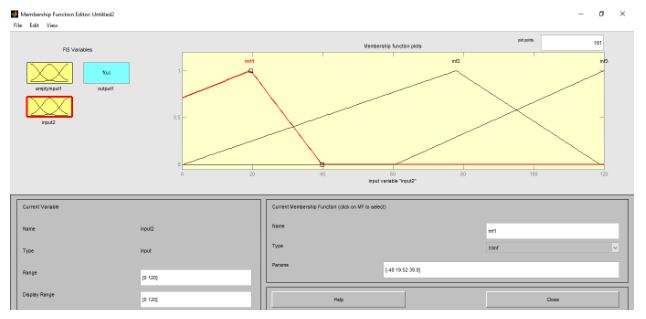
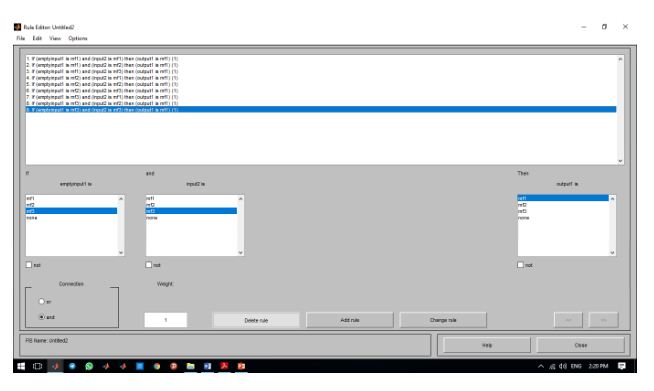
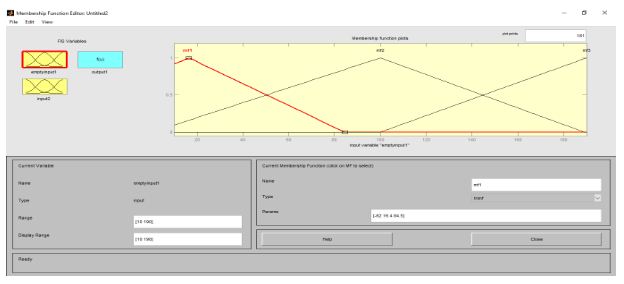
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به محیط شبیه سازی و خروجی های شبیه سازی قرار داده شده است:

نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.