
دانلود شبیه سازی مقاله کنترل سرعت موتور DC: بررسی کنترل کننده PID و منطق فازی
| عنوان فارسی |
کنترل سرعت موتور DC: موردی بین کنترل کننده PID و کنترل کننده منطق فازی |
| عنوان انگلیسی |
DC Motor Speed Control: A Case between PID Controller and Fuzzy Logic Controller |
| کلمات کلیدی |
کنترل سرعت موتور DC: موردی بین کنترل کننده PID و کنترل کننده منطق فازی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 5 | نشریه : Semantic Scholar |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 8 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله (این محصول دارای پاورپوینت 18 اسلایدی برای ارائه کلاسی هست) |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Multidisciplinary Sciences and Engineering (مجله بین المللی مهندسی و علوم چند رشته ای) |
| ترجمه: دارد (ترجمه 16 صفحه ای در قالب ورد و پی دی اف) | گزارشکار : دارد (4 صفحه + در یک فایل 4 صفحه ای نیز ترتیب و نحوه اجرای شبیه سازی، نشان داده شده است) | شبیه سازی : دارد (فایل های شبیه سازی در سیمولینک متلب با فرمت .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
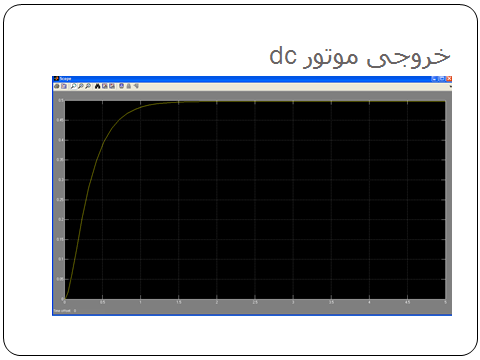
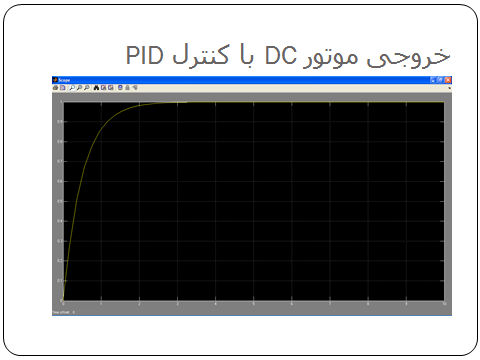
کنترل سرعت موتور DC با کنترلر PID
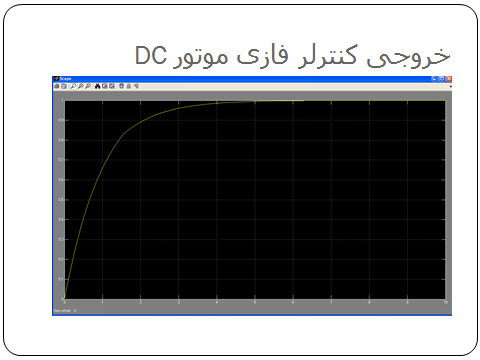
کنترل کننده های تناسبی انتگرالی مشتق گیر (PID) در کنترل موتورهایDC محبوبیت گسترده ای کسب کرده اند. اگرچه عملکرد آنها، مستلزم آن است که تا حدی بطور دستی توسط اپراتور تنظیم شود، اما هنوز رضایت بخش است اما استفاده از تنظیمخودکار برای آنها مطلوب است. در این پروژه، عملکرد موتور dc انتخابی توسط یک کنترل کننده تناسبی انتگرالی مشتق گیر (PID) مورد بررسی قرار گرفته است. یک فراجهش همراه با زمان نشست بزرگ مشاهده شده که رفتار کنترل کننده PID معمولی را تایید می کند. از این رو، تنظیم کنترل کننده PID به منظور دستیابی به عملکرد مطلوب از اهمیت شایانی برخوردار است. به بیان دیگر، کنترل کننده مبتنی بر منطق فازی که در موتور dc بکار رفته، مورد بررسی قرار گرفته است. با استفاده از قوانین خبره ویژه، هیچ فراجهش و زمان نشستی در مقدار مورد نظر وجود ندارد. با استفاده از کنترل کننده منطق فازی، تنظیم دستی حذف شده و تنظیم هوشمند بخش مرکزی با عملکرد رضایت بخش را ارائه می کند. اهمیت کنترل کننده هایPID در صنعت فرآیندی قابل تأکید نیست، زیرا بیش از نیمی از کنترل کننده های صنعتی که امروزه استفاده می شوند از PID یا طرح های کنترل PID اصلاح شده استفاده می کنند. کنترل کنندهPID (تناسبی انتگرالی مشتق گیر) دارای یک ساختار کنترل ساده است که به راحتی توسط اپراتورها قابل درک است و به آنها (اپراتورها) در تنظیم رضایت بخش PID کمک می کند. تنظیمPID از جنبه های مهم اجرای آن است. از سوی دیگر، استفاده از کنترل کننده منطق فازی در جایی که سیستم استنتاج فازی (FIS) هم برای پارامتر ورودی و هم برای پارامترهای خروجی کنترل کننده معمولی از نوع ممدانی، دارای پنج عملکرد عضویت می باشد، مورد بررسی قرار گرفته است. کنترل کننده مبتنی برFIS از نوع ممدانی به دلیل نزدیک اش به استدلال و زبان انسانی در دو طرف سیستم، یعنی ورودی و خروجی، مورد استفاده قرار گرفته است. ابزار تحقیق در این مطالعه متلب/سیمولینک می باشد که در آن شبیه سازی انجام شده و رفتارهای مناسب در مورد هر کنترل کننده (PID و فازی) نمایش داده شده است. دو کنترل کننده از نظر عملکرد مقایسه شده اند و مسیر مدرن تمرین مهندسی کنترل را توجیه می کنند، اگرچه هنوز جای پیشرفت وجود دارد.
بدون شک استفاده از کنترل کنندهPID به عنوان وسیله ای پیشرو محسوب می شود که موتورdc را خصوصاً در کنترل کننده PID با تنظیم دقیق از نظر استواری و پیشبینی پذیری سیستم کنترل می کند. در نظر گرفتن روش دیگری برای کنترل موتورdc با استفاده از کنترل کننده منطق فازی (از نوع ممدانی)، عملکرد قابل ملاحظه ای را نشان می دهد که البته بهینه نیست. کنترل کننده مبتنی بر منطق فازی بی نیاز به تنظیم و دارای یک واکنش کند در سیگنال ورودی است و نمی تواند به راحتی پایداری و همچنین استواری موتور dc را پیش بینی کند. بنابراین، هنوز فضای بیشتری برای پیشرفت در این زمینه وجود دارد.
این شبیه سازی در محیط سیمولینک متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:



نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.