دانلود شبیه سازی کنترل سرعت موتور DC با کنترل فازی و PID
کنترل کنندههای مشتقی – انتگرال گیر – تناسبی (PID)، محبوبیت زیادی در کنترل موتورهای DC بدست آوردهاند. علیرغم اینکه عملکرد آنها به کمی تنظیم دستی توسط اپراتور نیاز دارد، اما کماکان رضایت بخش است. البته تنظیم خودکار به مراتب مطلوبتر خواهد بود. در این پروژه، عملکرد موتور DC منتخب کنترل شده با کنترل کننده PID مورد بررسی قرار گرفته است. موتورهای DC، مزایای زیادی در کاربردهای صنعتی دارند، از جمله کنترل ساده سرعت و زاویه موتور. در این پروژه به بررسی روش کنترل سرعت موتور DC با استفاده از رویکردهای کنترل فازی و روش PID پرداخته شده است.

| گزارشکار: ندارد (در یک فایل ویدئویی 7 دقیقه ای، نحوه ران شدن شبیه سازی ها نشان داده شده است) | شبیه سازی : دارد (دو ام فایل متلب و یک فایل سیمولینک و دو فایل فازی) |
کنترل سرعت موتور DC
تمامی سیستمهای کنترلی از مشکلاتی همچون اورشوت نامطلوب، زمانهای تثبیت طولانیتر، ارتعاشات و پایداری در خلال رفتن از یک حالت به حالتی دیگر رنج میبرند. سیستمهای جهان واقعی ماهیتی غیرخطی دارند. مدلسازی دقیق آنها به دشواری صورت میگیرد. در اکثر مواقع، انجام این کار پُرهزینه و حتی غیرممکن است. سیستمهای رایج کنترل دیجیتال از جمله کنترل کنندههای کلاسیک PID و IMC، به صورت تخمینی مشکلات فوق را حل نمودهاند، با این وجود ما به سیستمهای کنترل دقیق و هوشمند برای دستیابی به پاسخ مطلوب نیاز داریم. کنترل کنندههای PID در اکثر مواقع برای کاربردهای کنترل موتور بکار میروند. علت این است که آنها ساختار سادهای دارند و الگوریتمهای کنترلیشان بخوبی قابل درک میباشند.پارامترهای کنترل کننده معمولاً با روش پاسخ فرکانسی زیگلر- نیکولاس تعیین میشوند.
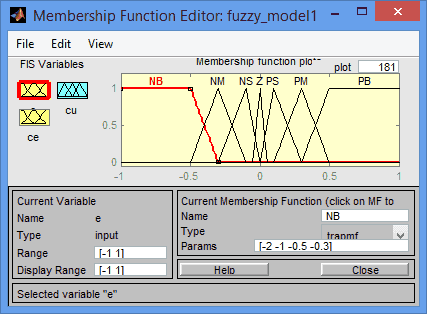
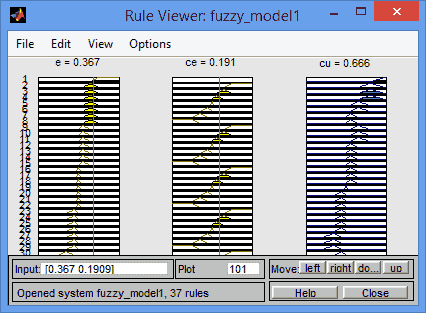
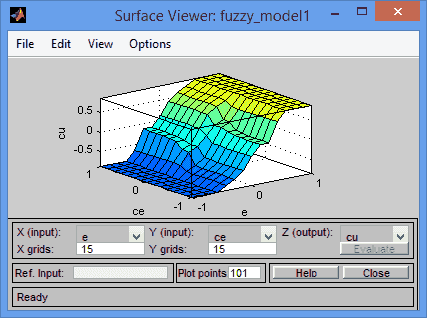
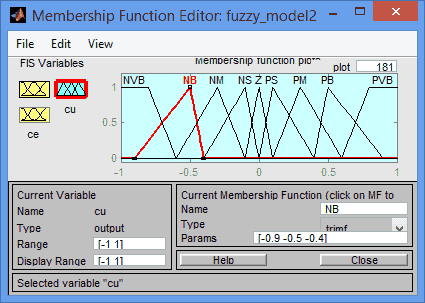
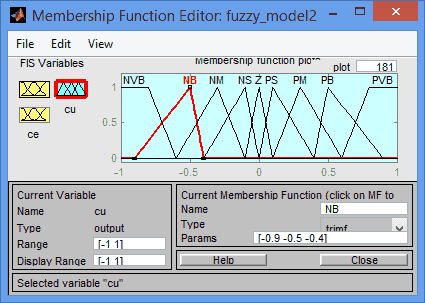
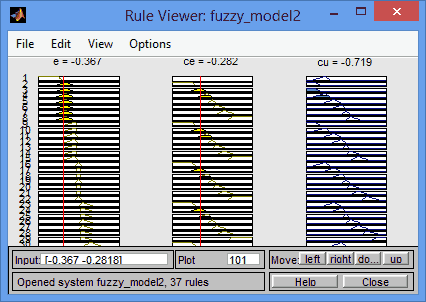
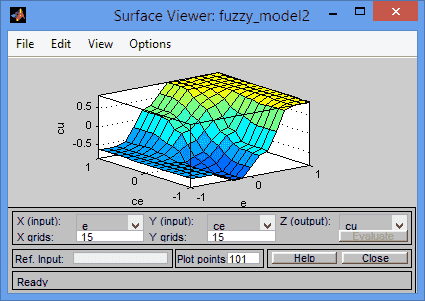
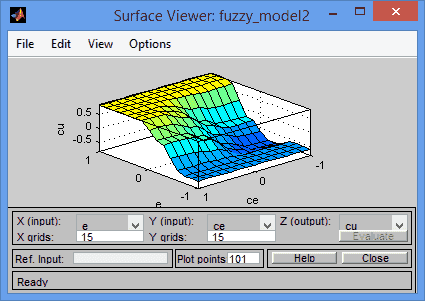
اهمیت کنترل کنندههای PID در صنعت پردازش با تاکید بیش از حد همراه نمیشود، زیرا بیش از نیمی از کنترل کنندههای صنعتی در حال بهره برداری در شرایط فعلی، از PID یا نسخه اصلاح شدهای از آن استفاده میکنند. کنترل کننده PID (تناسبی- انتگرالی- مشتقی) دارای ساختار کنترلی سادهای است. اپراتورها براحتی این ساختار را درک میکنند و به کمک آن PID را به شکل رضایت بخشی کنترل میکنند. بدین ترتیب تنظیم PID یکی از جنبههای مهم پیاده سازی آن به شمار میرود. از سوی دیگر، استفاده از کنترل کننده منطق فازی مورد بررسی قرار گرفته است. در بررسیهای صورت گرفته، سیستم استنتاج فازی (FIS) دارای 5 تابع عضویت است و پارامترهای ورودی و خروجی یک کنترل کننده متداول ممدانی (Mamdani) در آن لحاظ شدهاند.کنترل کننده مبتنی بر FIS ممدانی (Mamdani) بدلیل نزدیک بودن با نحوه استدلال و زبان انسانی، در هر دو سمت سیستم (یعنی ورودی و خروجی) بکار رفته است. از نرم افزار سیمولینک متلب برای انجام این شبیه سازی استفاده شده است. شبیه سازی ها اجرا میشوند و رفتارهای مناسب هر نوع کنترل کننده (PID و فازی) به نمایش گذاشته میشود. مقایسه بین دو کنترل کننده از جنبه عملکردی صورت گرفته است. لذا جهت گیری شیوههای مدرن مهندسی مورد تأیید قرار میگیرند، البته هنوز جا برای پیشرفت بیشتر وجود دارد.
استفاده از کنترل کننده PID به عنوان ابزار کنترل موتور DC، قطعاً از نظر مقاومت و پیش بینی پذیری سیستم، علی الخصوص برای کنترل کننده PID بخوبی تنظیم شده از بقیه جلوتر است. بررسی دیگر راجع به شیوه کنترل موتور DC با کنترل کننده منطق فازی ممدانی (Mamdani)، نشان دهنده عملکرد قابل قبول، هرچند غیربهینه است. کنترل کننده مبتنی بر منطق فازی به هیچ گونه تنظیمی نیاز ندارد، اما پاسخ نامطلوبی به سیگنالهای ورودی دارد و به شکل قطعی قادر به پیش بینی پایداری و مقاومت موتور DC نیست. لذا هنوز جای کار برای پیشرفت بیشتر در این حوزه وجود دارد.
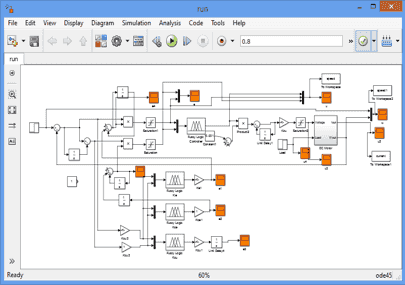
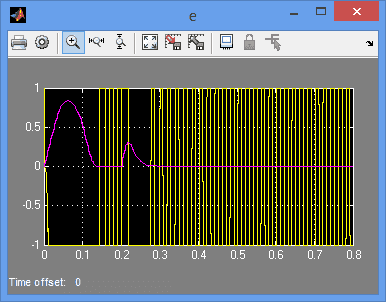
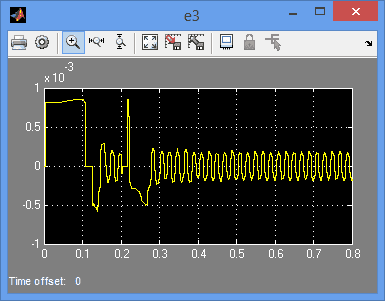
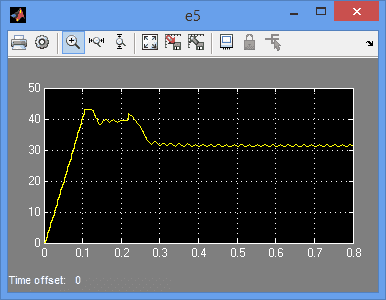
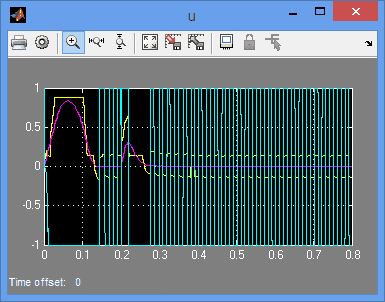
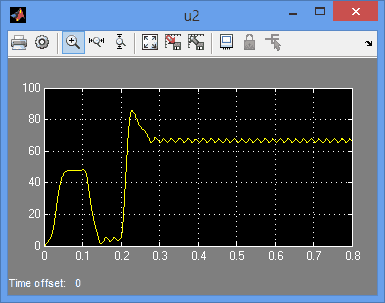
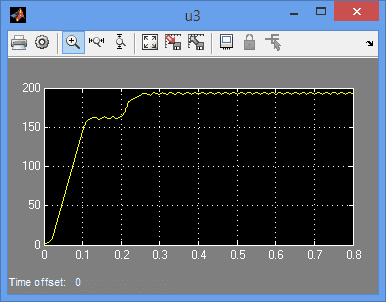
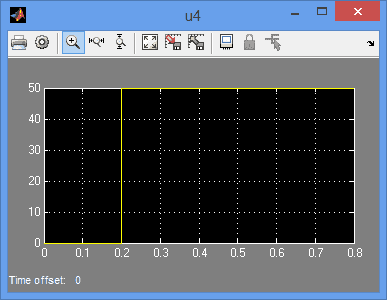
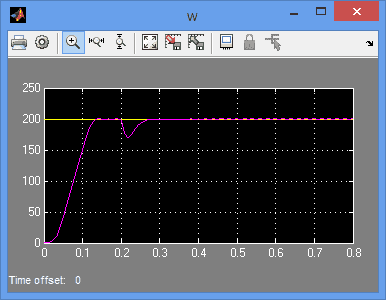
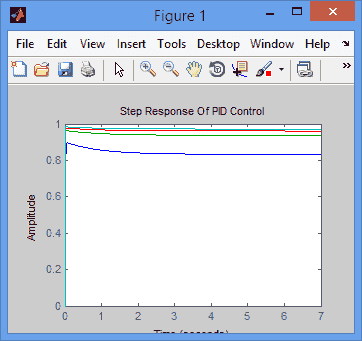
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به شبیه سازی و نیز خروجی های آن، قرار داده شده اند:

دیدگاهها

اعظم (مالک تایید شده) –
باعرض سلام میشه خود مقاله رو هم بفرمایید که اسمش چی هست یا ادرس دانلودش رو بفرستید ممنونم ازتون
mirbagher_fara –
این محصول مقاله نداره
اما مقالات زیادی هستند که با جستجوی همین عنوان در گوگل تقریبا مشابه همین شبیه سازی می باشند.
باتشکر