دانلود شبیه سازی مقاله کنترل غیر خطی ربات متحرک دو چرخ
| عنوان فارسی |
کنترل غیر خطی ساده یک ربات متحرک جوش دو چرخ |
| عنوان انگلیسی |
a simple nonlinear control of a two wheeled welding mobile robot |
| کلمات کلیدی |
ربات متحرک جوشکاری، مسیر یابی، تخمین rls، کنترل غیر خطی |
| درسهای مرتبط |
کنترل تطبیقی، کنترل غیر خطی، سیستم کنترل |
| تعداد صفحات انگلیسی : ۸ | نشریه : IEEE |
| سال انتشار : ۲۰۰۳ | تعداد رفرنس مقاله : ۱۶ |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Control Automation and Systems |
| ترجمه: ندارد | گزارشکار : دارد (فایل راهنمای 10 صفحه ای) | شبیه سازی : دارد (3 فایل شبیه سازی در متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل غیر خطی ربات متحرک
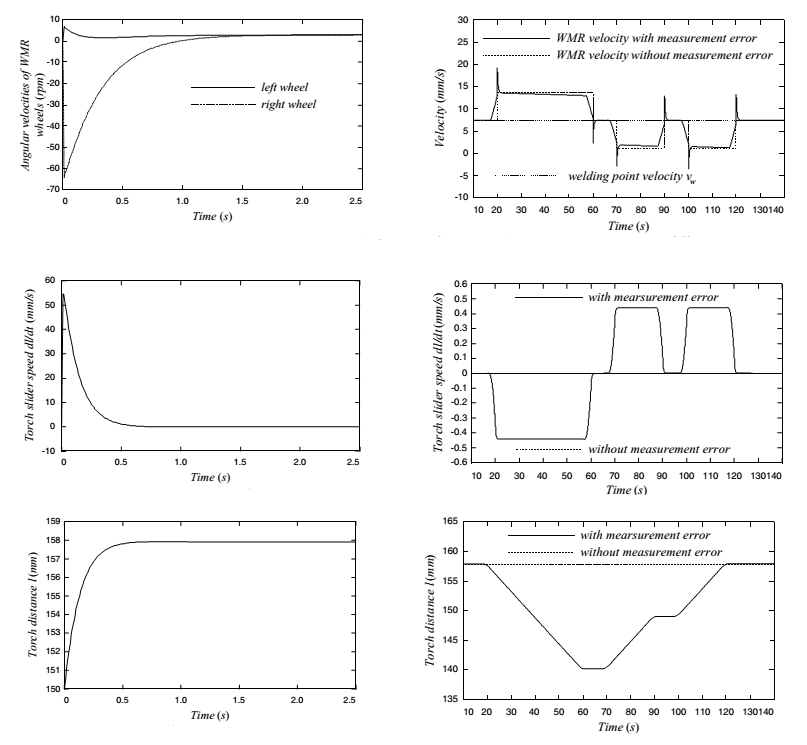
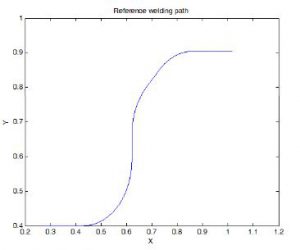
این مقاله یک کنترل کننده ساده، قوی و غیر خطی را بر اساس پایداری Lyapunov برای ردیابی مسیر جوشکاری مرجع و سرعت یک ربات متحرک جوش دو چرخ (WMR) ارائه می دهد. سیستم دارای سه درجه آزادی شامل دو چرخ و یک لغزنده مشعل است. حرکت کشویی مشعل برای ردیابی سریعتر مورد استفاده قرار می گیرد، زیرا سرعت جوشکاری بسیار کند است.
قانون کنترل از عملکرد کنترل Lyapunov به دست می آید تا ثبات آسیب پذیری سیستم را تضمین کند. کنترل کننده دارای سه پارامتر آزاد برای تنظیم عملکرد سیستم کنترل شده است. روش ساده اندازه گیری خطاها با استفاده از دو پتانسیومتر معرفی شده است. اثربخشی کنترل کننده پیشنهادی از طریق نتایج شبیه سازی نشان داده شده است.
شبیه سازی های این مقاله در نرم افزار متلب صورت گرفته است و در ادامه بخشی از نتایج حاصل از شبیه سازی ها نشان داده شده است.
کنترل غیر خطی ربات با تخمین rls






دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.