دانلود شبیه سازی مقاله کنترل کننده حالت لغزشی فازی برای UPFC جهت بهبود پایداری گذرا
| عنوان فارسی |
طراحی یک کنترل کننده حالت لغزشی – فازی برای UPFC جهت بهبود پایداری گذرا |
| عنوان انگلیسی |
Designing of a fuzzy-sliding mode Controller for UPFC to Improve the Transient Stability |
| کلمات کلیدی |
پایداری گذرا؛ یادگیری احساسی؛ کنترل کننده شارش توان یکپارچه (UPFC) |
| درسهای مرتبط |
دینامیک سیستم های قدرت؛ کنترل |
| تعداد صفحات انگلیسی : 11 | نشریه : Research Gate |
| سال انتشار : 2017 | تعداد رفرنس مقاله : 30 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Majlesi Journal of Mechatronic Systems (مجله سیستم های مکاترونیک) |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات شبیه سازی در 5 صفحه) | شبیه سازی : دارد (دو فایل شبیه سازی در سیمولینک متلب با فرمت .mdl و یک فایل فازی با فرمت .fis) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترلر مد لغزشی برای UPFC
با افزایش اهمیت ارزیابی دینامیک آنلاین امنیت، روش مستقیم لیاپونوف را می توان مورد استفاده قرار داد تا از تکرار وقت گیر حل معادلات دیفرانسیل غیرخطی یک سیستم به صورت گام به گام، جلوگیری شود. اما، برای بکار گیری این روش مستقیم، باید تابع لیاپونوف صحیح برای سیستم قدرت الکتریکی (EPS)، داشته باشیم. گرچه، توابع لیاپونوف مختلف بسیاری برای یک سیستم بدون ادوات FACTS، ساخته شده است، اما تابع بدست آمده با انتگرال گیری معادلات سوئینگ (نوسان) یک سیستم و بنابراین نمایش حاصلجمع انرژی های جنبشی و پتانسیل، بهترین نتایج را حاصل کرده است. ناپایداری سیستم قدرت، بخاطر تجزیه یا فروریختن عایق، خطوط انتقال طولانی، شبکه به هم متصل، بارهای سیستم متغیر و دیگر آشفتگی های پیش بینی نشده در سیستم، می باشند. این ناپایداری ها، باعث کاهش جریان یا حتی قطع خط می شوند. ادوت FACTS، سیستم های انتقال را با افزایش قابلیت انتقال و کاهش ریسک قطع خط، تثبیت می کنند. مزیت های دیگر نسبت داده شده به ادوات FACTS، فروش انرژی اضافه، بخاطر افزایش قابلیت انتقال، کاهش بارها یا شارژهای چرخان (wheeling charges) بخاطر افزایش قابلیت انتقال و بخاطر تاخیر در سرمایه گذاری بر خطوط انتقال فشار قوی یا حتی تاسیسات تولید توان جدید، می باشند. این ادوات، سیستم های انتقال را با افزایش قابلیت انتقال و کاهش ریسک قطع خط، تثبیت می کنند. مسئله اصلی در سیستم قدرت، ثابت نگه داشتن پارامترهای قابل قبول سیستم مانند ولتاژ شینه، توان راکتیو و توان اکتیو تحت شرایط عملکرد نرمال و غیرنرمال، می باشد. معمولاً، این مسئله تنظیم سیستم و بازیابی همگامی (سنکرونیسم) بعد از خطای عمده، برای این پدیده، بسیار مهم و اساسی می باشد. خطاها می توانند باعث از دست رفتن همگامی شوند. خطاها، به عنوان اثرات ناپایداری، بخاطر تجزیه یا تخریب عایق، در نتیجه یونیزه شدن هوا توسط صاعقه، ترکیدن کابل های قدرت، می باشند.
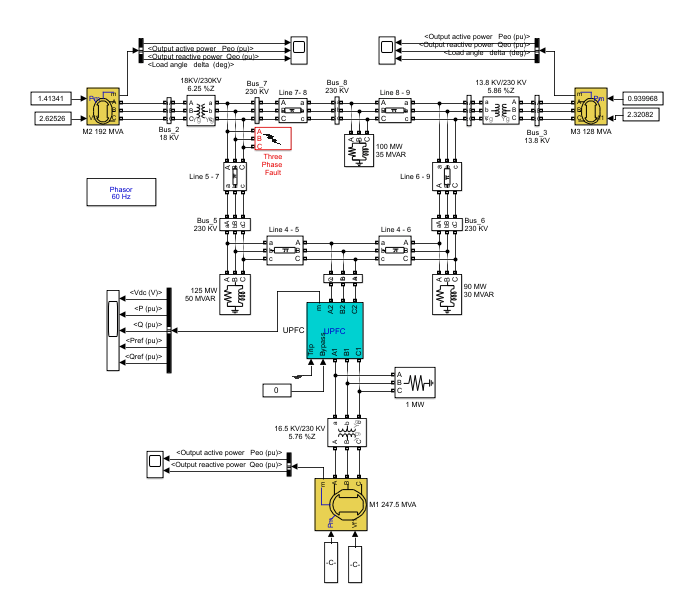
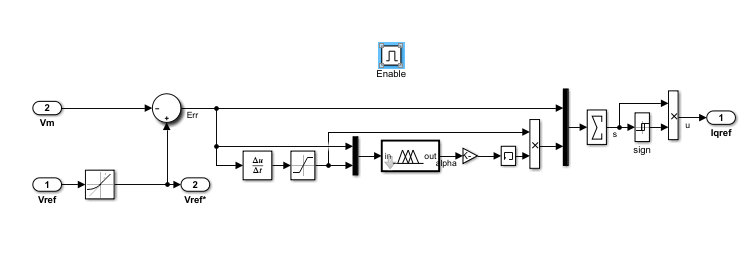
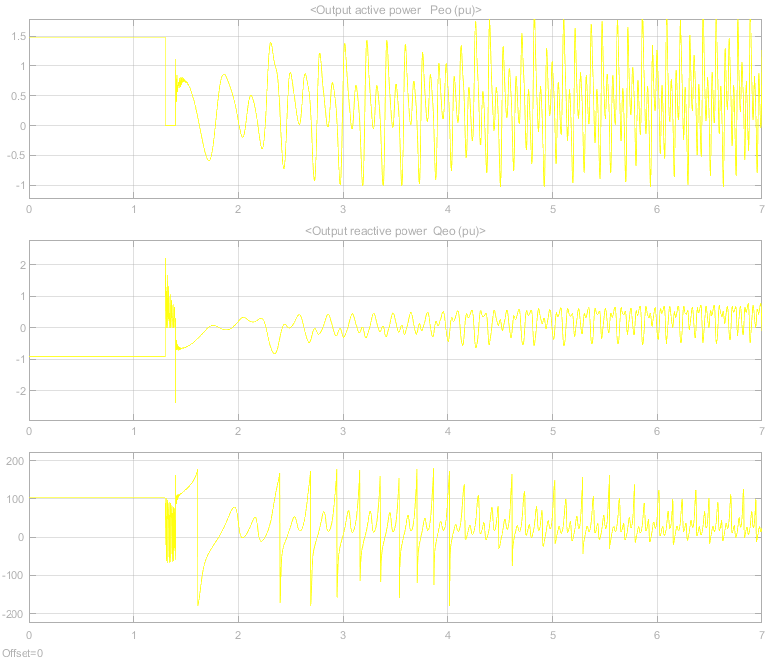
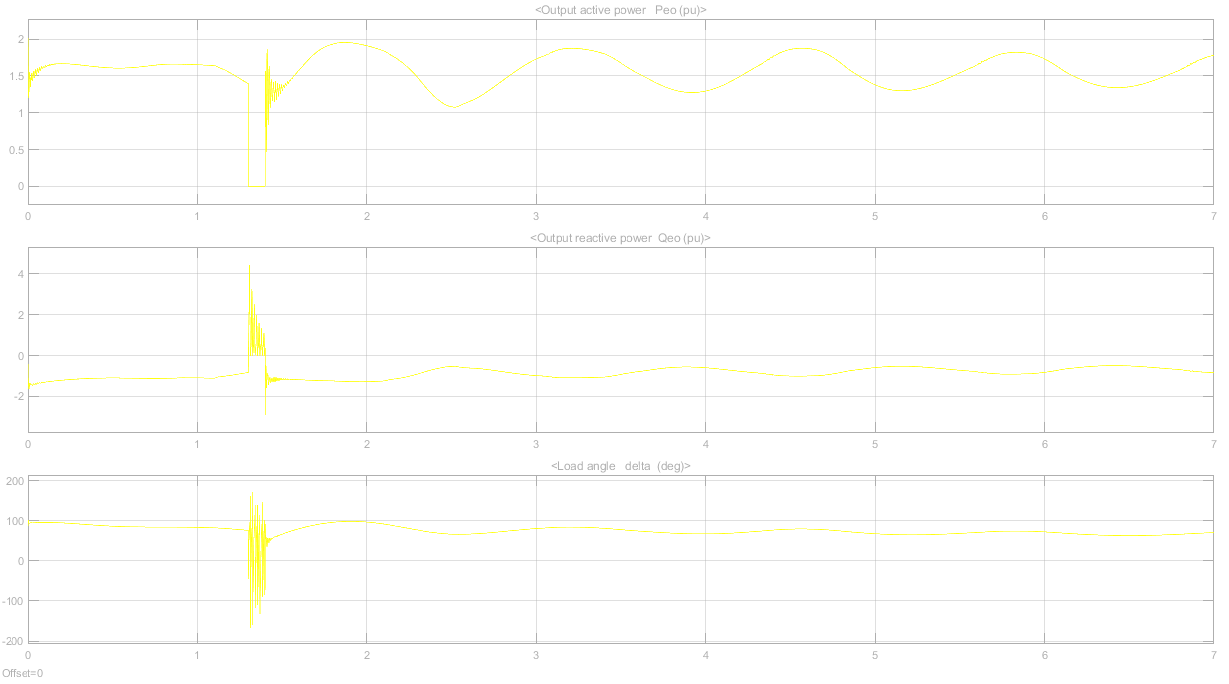
در این پروژه، بهبود پایداری گذرا با استفاده از UPFC با کنترلر PI و FSM، مورد مطالعه قرار گرفته است. کاربرد UPFC همراه با FSM، برای بهبود پایداری گذرا، موثرتر از کنترلر PI می باشد. این کنترلر هوشمند هیجانی، با یک ساختار بدون مدل و ساده، اثر بهتری بر میرایی نوسانات، کاهش اضافه جهش و بهبود CCT دارد. تست های شبیه سازی کامپیوتری، اثربخشی و برتری FSM در سیستم چند ماشینی و تک ماشینی را نشان می دهند.
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به محیط شبیه سازی و نیز نتایج خروجی مربوط به آن قرار داده شده است:


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.