دانلود شبیه سازی مقاله کنترل مستقل دو موتور سنکرون مغناطیس دائم تغذیه شده با اینورتو چهارپایه
| عنوان فارسی |
کنترل مستقل دو موتور سنکرون مغناطیس دائم تغذیه شده با اینورتو چهارپایه |
| عنوان انگلیسی |
Independent Control of Two Permanent-Magnet Synchronous Motors Fed by a Four-Leg Inverter |
| کلمات کلیدی |
اینورتر چهارپایه (4LI)؛ موتور سنکرون مغناطیس دائم (PMSM)؛ مدولاسیون دو بازویی؛ جبرانسازی پتانسیل نقطه خنثی |
| درسهای مرتبط |
ماشین های الکتریکی؛ الکترونیک قدرت |
| تعداد صفحات انگلیسی : 8 | نشریه : IEEE |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 13 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Industry Applications (مجله کاربردهای صنعتی) |
| ترجمه: ندارد | گزارشکار : ندارد | شبیه سازی : دارد (یک فایل شبیه سازی در سیمولینک متلب با فرمت .slx) |
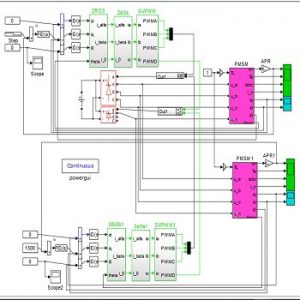
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه کنترل مستقل موتور سنکرون مغناطیس دائم
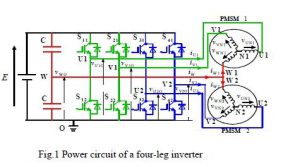
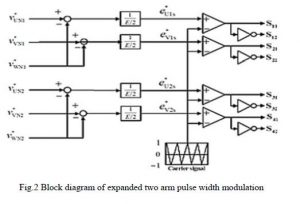
در پروژه ها، جهت کاهش تعداد ادوات کلیدزنی و همچنین حجم، یک اینورتر اتصال V با دو انشعاب، پیشنهاد شده است. اینورتر اتصال V برای تقسیم ولتاژ فاز یک اینورتر به دو بخش، نیاز به دو خازن دارد. یک اینورتر می تواند تنها یک موتور سنکرون مغناطیس دائم سه فاز (PMSM) را به حرکت درآورد. بنابراین، دو اینورتر اتصال V برای هدایت مستقل دو PMSM، لازم می باشند. روش دیگر هدایت مستقل موتورها، استفاده از اینورتر چهار شاخه (4LI) می باشد. کنترل سرعت مستقل موتورهای القایی تغذیه شده توسط 4LI، در برخی از پروژه ها و تحقیقات گزارش شده اند. اما، مقالات اندکی در مورد کنترل مستقل دو PMSM با استفاده از یک اینورتر چهارشاخه، ارائه شده اند. این پروژه، به تفصیل، کنترل برداری مستقل دو PMSM تغذیه شده بوسیله 4LI و روش های جبرانسازی نوسانات ولتاژ نقطه خنثی خازن های دو تکه را پیشنهاد می دهد. کنترل مستقل سرعت و موقعیت دو PMSM تغذیه شده بوسیله 4LI با استفاده از کنترل برداری چندین مزیت دارد. اول اینکه، روش مدولاسیون عرض پالس مورد استفاده برای اینورتر منبع ولتاژ سه فاز، مستقیماً برای 4LI کاربرد ندارد، زیرا تنها دو فاز باید برای هر اینورتر، مدوله شوند. دوم اینکه، مشخصات درایو سرعت و موقعیت، ناپایدار می شوند هنگامی که ولتاژ نقطه خنثی مربوط به دو خازن، انحراف پیدا کنند و در نتیجه باعث ایجاد ولتاژ خازن نامتوازن می شود. برای رفع این مسائل، این پروژه، یک روش مدولاسیون دوشاخه بسط یافته را ارائه می دهد. این روش تنها دو فاز را مدولاسیون می کند تا ولتاژهای سه فاز لازم برای کنترل دو درایو موتور را مدولاسیون می کند. همچنین، این پروژه، روش خودکار دستیابی به جریان سه فاز متوازن با استفاده از روش کنترل برداری را پیشنهاد می دهد. روش موثر برای جبرانسازی نوسانات ولتاژ دو سر دو خازن نیز توضیح داده می شود. روش جبرانسازی پیشنهادی و کنترل مستقل دو PMSM، بوسیله 4LI با کنترل سرعت، به صورت تجربی اعتباریابی می شوند و نتایج ارائه می شوند. نتایج تجربی کنترل موقعیت نیز ارائه می شوند.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به این شبیه سازی قرار داده شده است:


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.