دانلود شبیه سازی مقاله روش کنترل بدون سنسور برای موتورهای DC بدون جاروبک
| عنوان فارسی |
رویکردی جدید در روش کنترل بدون سنسور برای موتورهای DC بدون جاروبک |
| عنوان انگلیسی |
A New Approach to Sensorless Control Method for Brushless DC Motors |
| کلمات کلیدی |
موتور BLDC؛ محدوده سرعت کامل؛ کنترل بدون سنسور؛ ناظر ورودی ناشناخته |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 11 | نشریه : ResearchGate |
| سال انتشار : 2008 | تعداد رفرنس مقاله : 20 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Control, Automation, and Systems (مجله بین المللی کنترل، اتوماسیون و سیستم ها) |
| ترجمه: دارد (ترجمه 25 صفحه ای در قالب WORD و PDF) | گزارشکار : دارد (توضیحات مختصر شبیه سازی در 3 صفحه) | شبیه سازی : دارد (یک فایل شبیه سازی در سیمولینک متلب با فرمت .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب کنترل موتور DC بدون جاروبک
موتورهای DC بدون جاروبک (BLDC)، از مزیت چگالی توان بالاتر از موتورهای دیگر مانند موتورهای القایی بهره می برند، که علت آن عدم وجود تلفات مسی در طرف روتور است و در مقایسه با موتورهای DC، نیاز به مکانیزم کموتاسیون مکانیکی ندارند، و در نتیجه ساختار فشرده و مقاومی حاصل می کنند. به لطف این ویژگی ها، موتورهای BLDC، در کاربردهایی که بازده، یکی از مسائل اساسی است یا جایی که جرقه های ناشی از کموتاسیون مکانیکی نباید وجود داشته باشند، رایج تر شده است. موتور BLDC برای انجام پردازش کموتاسیون به یک اینورتر و یک حسگر موقعیت روتور نیاز دارد، زیرا یک موتور سنکرون مغناطیس دائم در موتورهای DC، جاروبک یا کموتاتور ندارد. با این حال، حسگر موقعیت، چندین عیب از منظر هزینه درایو، اندازه ماشین، قابلیت اطمینان و ایمن بودن در برابر نویز دارد. در نتیجه، بسیاری از محققان درایوهای بدون حسگری را گزارش داده اند که می توانند بدون حسگر موقعیت سوار شده بر محور، موقعیت، سرعت و یا گشتاور را کنترل کنند.
روش های کنترل بدون حسگر متداول را می توان به چهار دسته تقسیم نمود. اولین دسته، روش حسگری جریان فاز باز است که روشی برای شناسایی بازه زمانی وصل بودن دیودهای هرزگرد متصل شده به صورت پادموازی به ترانزیستورهای قدرت، می باشد. این روش، این مزیت را دارد که پردازش سنکرون، آسان است و مشخصه های کنترل در سرعت های پایین، عملکرد بالایی دارد. با این حال، دقت تفکیک موقعیت روتور در سرعت های بالا به میزان قابل توجهی کاهش می یابد. بخصوص اینکه، برای محقق شدن این روش، این عیب را دارد که برق جداگانه دیگری لازم است تا یک مقایسه گر مورد استفاده جهت شناسایی جریان هرزگرد را تامین برق کند. دومین دسته، روش شناسایی هارمونیک سوم EMF بازگشتی می باشد که روشی برای حذف همه مولفه های بنیادی و چندفاز دیگر از طریق جمع بندی ساده ولتاژهای سه فاز است. در اینجا، نیاز کمتری به فیلتر برای تابع انتگرال گیری انجام شده برروی یک سیگنال هست که فرکانسی سه برابر سیگنال فرکانس پایه یا بنیادی دارد. این فیلتر ظرفیت بسیار کمتری نسبت به روش شناسایی شار با استفاده از EMF برگشتی دارد، به تاخیر فیلترها حساس نیست و به عملکرد بالاتری در یک بازه گسترده سرعت، دست پیدا می کند. با این حال، یک نقطه خنثی که در فرآیند ساخت موتور مورد ملاحظه قرار نمی گیرد، برای سنجش ولتاژ فاز لازم است. همچنین، شناسایی هارمونیک سوم در محدوده سرعت پایین دشوار است. دسته سوم، روش انتگرال گیری EMF برگشتی، روشی براساس این اصل است که انتگرال از «نقطه عبور از صفر» (ZCP) تا 30 درجه، ثابت است. این روش، این مزیت را دارد که عملکرد پردازنده اصلی کاهش می یابد و مشاهده می شود که لازم نیست یک نقطه تبدیل دیگر در حالت کلید زنی، محاسبه شود. این روش جریان فاز را با EMF بازگشتی در درایو بدون حسگر، همگان نمی کند. علاوه بر آن، استفاده از درایو تضعیف کننده شار، غیرممکن است. در نهایت اینکه، روش حسگری ولتاژ فاز باز، طرحی است که به صورت غیرمستقیم موقعیت روتور را با استفاده از شناسایی ZCP ولتاژ ترمینال فاز باز، تخمین می زند. این روش، پر استفاده ترین روش کنترل بدون حسگر است. با این حال، این روش، پاسخ ضعیفی در حالت گذرا دارد و نیاز به سرعت عملکرد به اندازه کافی بالایی برای شناسایی ZCP ولتاژ ترمینال ها دارد.
برای حل مسائل گفته شده در بالا، این پروژه، یک روش کنترل بدون حسگر جدید با بکارگیری یک ناظر ورودی مجهول دارد. ناظر ورودی مجهول به میزان گسترده ای، بخصوص در زمینه شناسایی خطا مورد پژوهش قرار گرفته است. با این حال، این ناظر در کاربرد کنترل موتور BLDC بدون حسگر بکار گرفته نشده است. بنابراین، این مقاله، یک راهکار جدید بسیار مفید برای یک درایو موتور BLDC بدون حسگر پیشنهاد می کند که می تواند به نحو موثر یک EMF بازگشتی خط به خط را برآورد کند.
شبیه سازی این مقاله با نرم افزار متلب ورژن 2012b انجام شده است.
شبیه سازی به صورت شکل زیر می باشد:
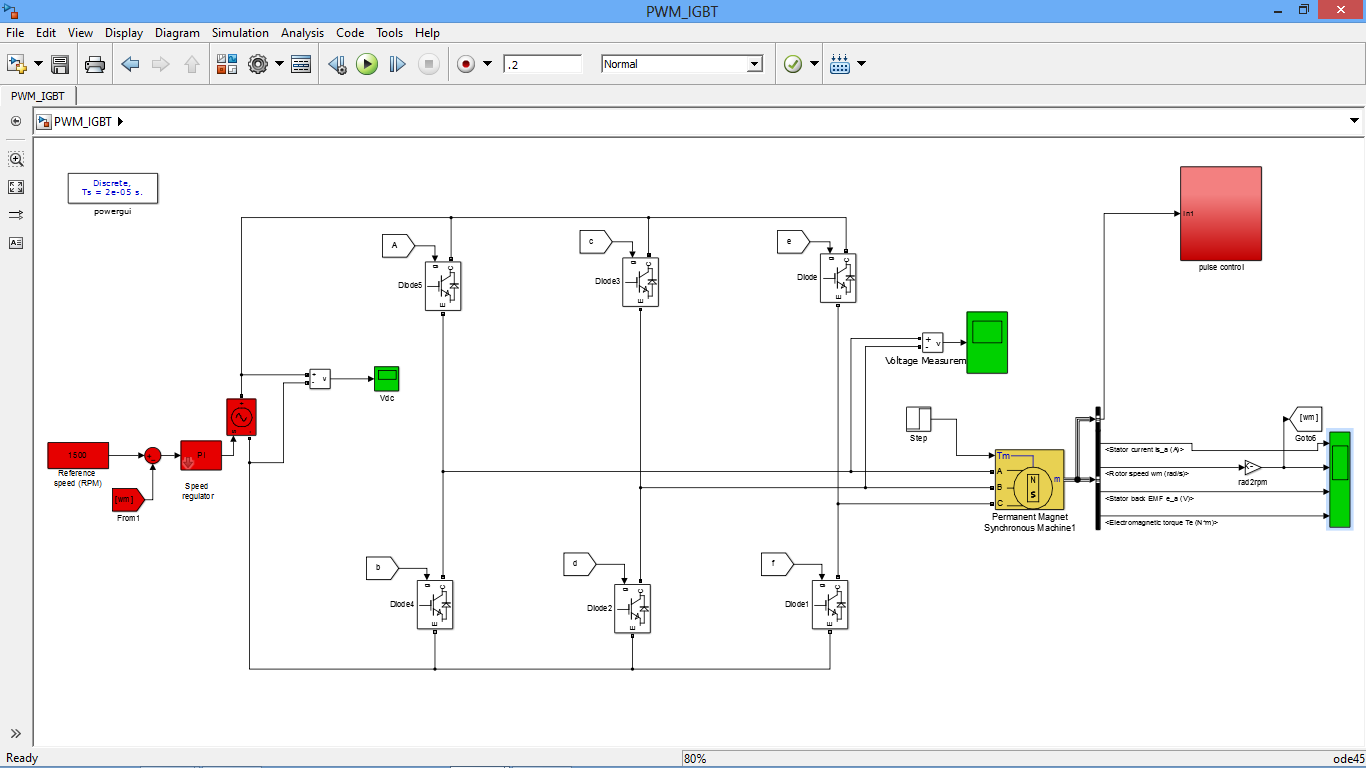
بلوک های قرمز رنگ، مدار کنترلی هستند و بلوک های سبز رنگ، اسکوپ های مدار هستند و شکل موج ها را به ما نشان می دهند. بلوک زرد رنگ نیز موتور dc بدون جاروبک است.
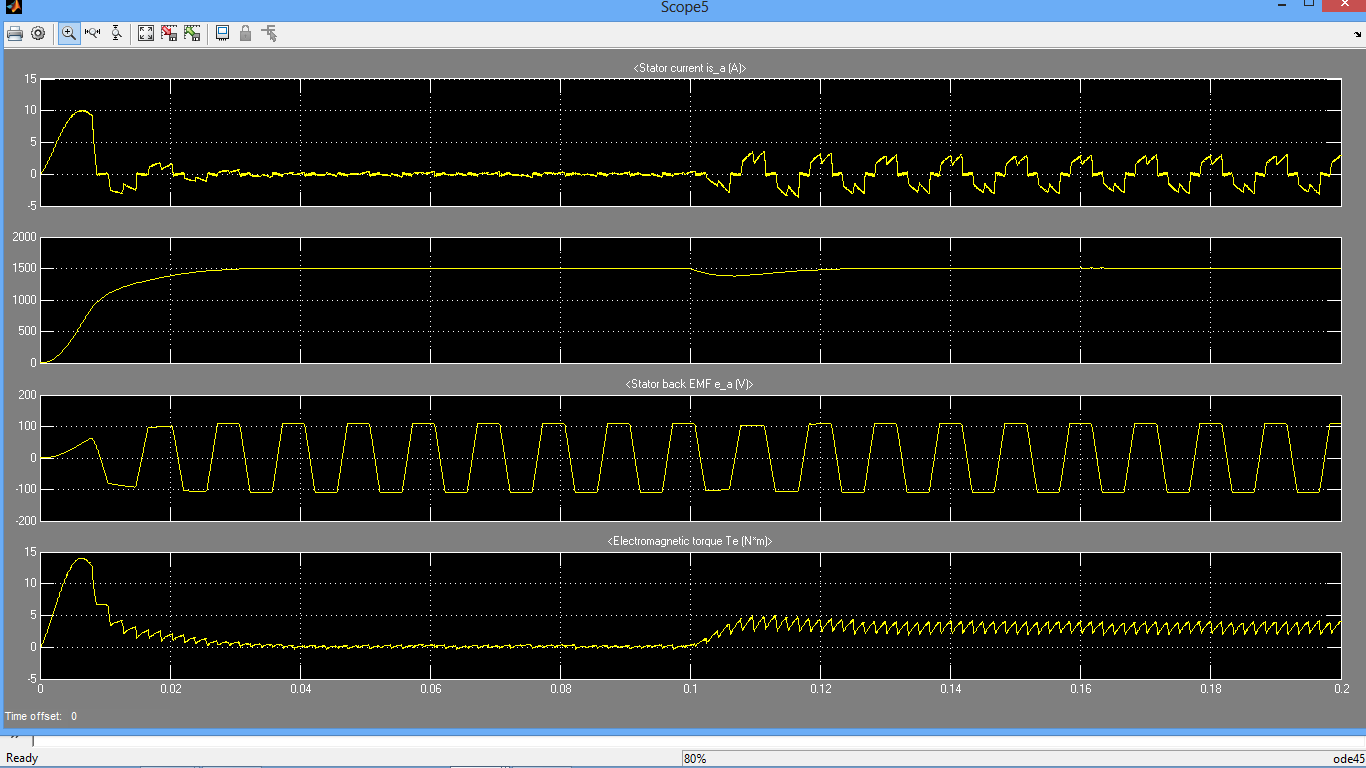
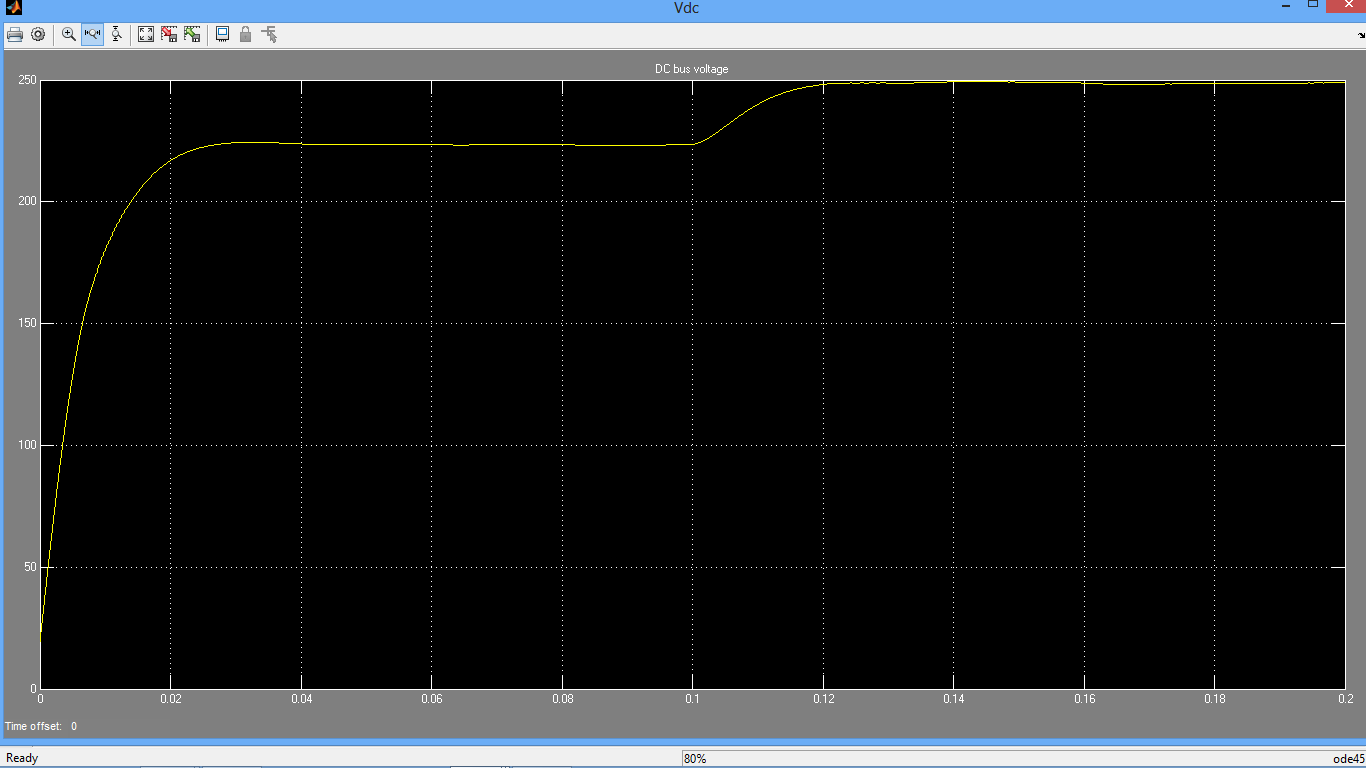
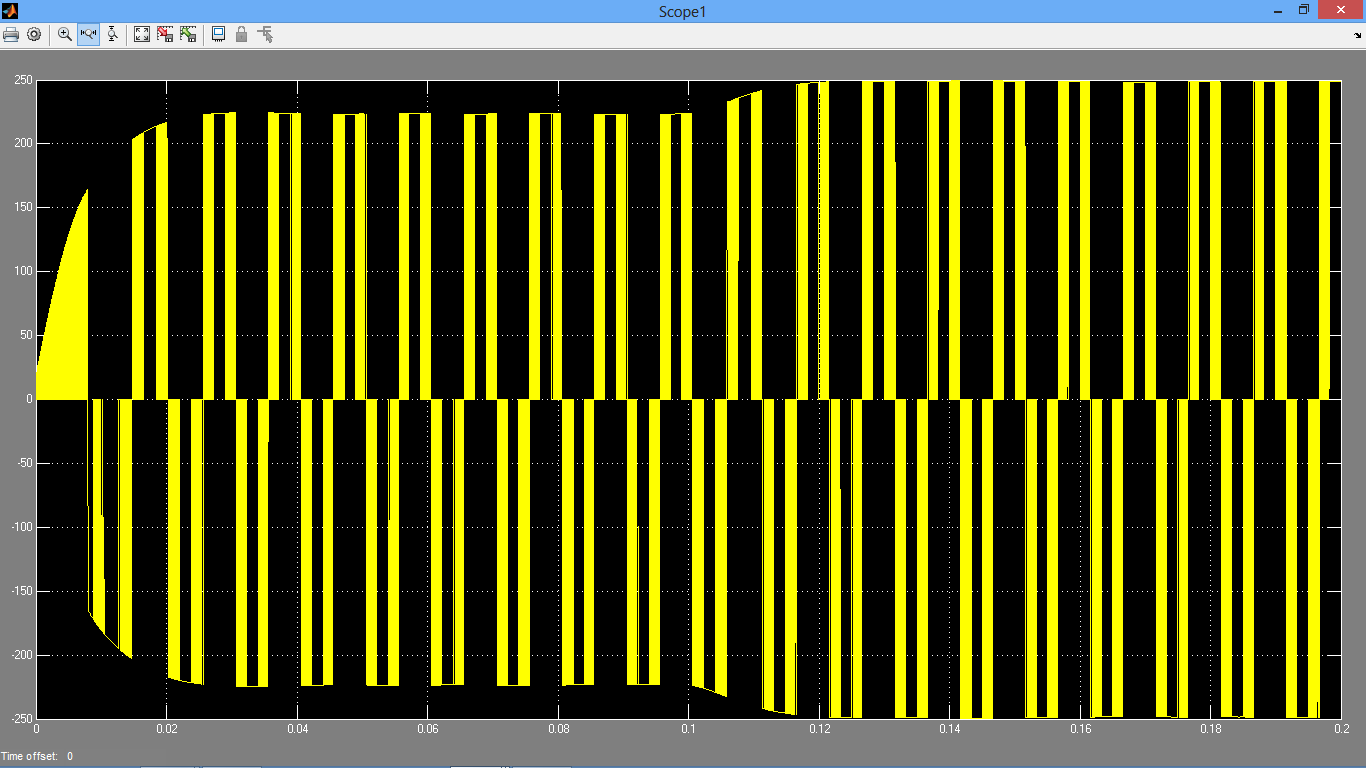
در ادامه تصاویر مربوط به خروجی های شبیه سازی قرار داده شده اند:


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.