
دانلود شبیه سازی مقاله کنترل موقعیت سروو موتور AC با رویکرد کنترل مدل داخلی
| عنوان فارسی |
کنترل موقعیت سروو موتور AC با استفاده از رویکرد کنترل مدل داخلی |
| عنوان انگلیسی |
Position Control of AC Servomotor Using Internal Model Control Strategy |
| کلمات کلیدی |
سروو موتور AC؛ کنترل مدل داخلی (IMC)؛ کنترل سه گانه؛ پایداری کنترل؛ دیاگرام Bode |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 5 | نشریه : Semantic Scholar |
| سال انتشار : 2015 | تعداد رفرنس مقاله : 8 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Engineering Innovation & Research (مجله بین المللی تحقیقات و نوآوری مهندسی) |
| ترجمه: دارد (ترجمه 12 صفحه ای در قالب ورد و پی دی اف) | گزارشکار : دارد (گزارشکار 21 صفحه ای در قالب فایل ورد که به توضیحات مرتبط با شبیه سازی و خروجی های آن پرداخته است) | شبیه سازی : دارد (دو ام فایل متلب و یک فایل سیمولینک) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل سروو موتور AC
معمولاً سروو موتور AC در کاربردهای کنترلی مختلفی مانند محرک روبات، مرکز ماشین کاری، کنترل عددی کامپیوتری و ماشین آلات و روبوت صنعتی دقیق، بکار گرفته می شود. بخاطر وجود خواص الکتریکی، مکانیکی و بازده بالا، این باور وجود دارد که سیستم سروو AC، پاسخ دقیقی برای ردیابی موقعیت و بازیابی سریع از آشفتگی های بیرونی یا تغییرات بار، دارد. معمولاً کنترلرهای PD/PID متداول در ردیابی موقعیت در حضور آشفتگی های بیرونی یا تغییرات بار، مورد استفاده قرار می گیرند. البته، مسیر مرجع یا آشفتگی بار، ماهیت دوره ای و متناوب دارند؛ کنترلرهای متداول قادر به دستیابی به ردیابی مناسب نیستند. برای رفع این مسائل، استراتژی های کنترل مدل داخلی، توصیه می شوند. کنترلرهای مدل داخلی، براساس «اصل مدل داخلی» (IMP) می باشد. هدف اصلی کنترل مدل داخلی این است که خطای ردیابی با افزایش تعداد آزمایش و خطاها، کاهش یابد. مفهوم اصلی ارائه شده در این پروژه، دقیقاً در مورد یک کنترل موقعیت سیستم سروو موتور AC و تحلیل عملکرد ردیابی، می باشد.
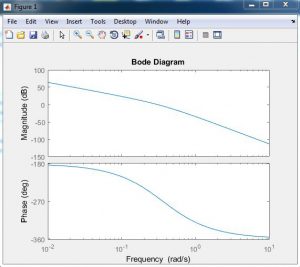
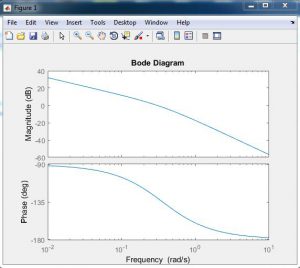
در این پروژه، براساس مدل ریاضیاتی سروو موتور AC، کنترلرهای PID و IMC طراحی و مقایسه می شوند، تا یک روش کنترل راحت تر، یعنی کنترلر PID، را بهتر معین کنیم. نتایج شبیه سازی نشان می دهند که همه این کنترلرها، برای بهبود مشخصات حوزه زمانی پاسخ سیستم، مانند زمان نشست و اضافه جهش، کارآمد و کافی می باشند. نتایج نشان می دهند که روش IMC عملکرد بهتری در مقایسه با کنترلر PID با کاهش اضافه جهش، زمان نشست و کمینه سازی زمان اوج، حاصل خواهد کرد. همچنین، سیستم دارای حاشیه بهره بیشتر می تواند در برابر تغییرات بزرگتر پارامترهای سیستم قبل از ناپایدار شدن در حلقه بسته، مقاومت کند.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصاویری از خروجی های شبیه سازی قرار داده شده است:




نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.