دانلود شبیه سازی مقاله شرایط LMI جهت طراحی کنترل کننده مبتنی بر ناظر در سیستم خطی
| عنوان فارسی |
شرایط LMI جهت طراحی کنترل کننده مبتنی بر ناظر در سیستم های خطی با عدم قطعیت پارامترها |
| عنوان انگلیسی |
On LMI conditions to design observer-based controllers for linear systems with parameter uncertainties |
| کلمات کلیدی |
کنترل مبتنی بر ناظر؛ رویکرد نابرابری های ماتریس خطی (LMIها)؛ سیستم های خطی نامشخص |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 5 | نشریه : ELSEVIER |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 23 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |
| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Automatica |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات 1 صفحه ای شبیه سازی شامل توضیحات خط به خط کدهای شبیه سازی) | شبیه سازی : دارد (2 فایل شبیه سازی در متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترلر مبتنی بر ناظر در سیستم خطی
عدم قطعیت ها و اغتشاشات، غالباً در سیستم های کنترل عملی دیده می شوند، زیرا بدست آوردن مدل های ریاضیاتی دقیق، اغلب بسیار دشوار است. این بخاطر نویزهای محیطی، خطاهای داده ها، سن زدگی سیستم ها، پارامترهای غیرقطعی یا به آرامی متغیر و غیره می باشد. وجود عدم قطعیت ممکن است باعث ناپایداری و عملکرد بد برروی یک سیستم کنترل شده شود. بنابراین، تلاش های قابل ملاحظه ای برای پایداری مقاوم و تثبیت سیستم های خطی با عدم قطعیت پارامتر، اختصاص داده شده اند.
در تعدادی مدل های واقعی، کنترل بازخورد حالت، ممکن است نتواند امکان پایداری را تضمین کند، هنگامی که تعدادی از حالت های سیستم قابل سنجش نباشند. به این علت است که یک ناظر حالت لازم است و در کنترل فیدبک شامل می شود.
کنترلرهای مبتنی بر ناظر، اغلب برای تثبیت سیستم های ناپایدار یا بهبود عملکرد سیستم، استفاده می شوند. مسئله تثبیت مبتنی بر ناظر برای هر دو سیستم های خطی قطعیتی و احتمالاتی، به درستی در مقالات دیگر، مورد بررسی و تحلیل قرار گرفته است. یک استراتژی کنترل بهینه مبتنی بر ناظر نیز در پژوهش های قبلی، ارائه شده است. با این حال، برای سیستم های غیرقطعی، الگوریتم عام وجود ندارد. فعالیت های پژوهشی زیادی در سالهای اخیر برای هر دو سیستم های خطی و غیرخطی با پارامترهای غیرقطعی، انجام شده است. اما، روش های بدست آمده، محافظه کارانه باقی مانده اند.
علاوه بر آن، روش های قابل توجهی در مقالات و پژوهش های مختلف وجود دارند که به حل مسئله طراحی کنترلر فیدبک خروجی با استفاده مستقیم از شرایط BMI، پرداخته اند. اما، بخوبی می دانیم که حل یک BMI، یک مسئله «NP-hard» از دیدگاه پیچیدگی است، که این یکی از معایب پیاده سازی عددی است. برای غلبه بر این مسئله، تعدادی روش فیدبک خروجی دینامیک مهم و عمومی، گاهینت و چیلالی با استفاده از آرگومان های مرتبط و ابزارهای ریاضیاتی معقولانه، ارائه شده اند. با این حال، در این پروژه، مطالعه خود را بر طراحی کنترلرهای مبتنی بر ناظر، که تعدادی تفاوت بخاطر ساختار خاصش دارد، معطوف می کنیم.
در این پروژه، یک روش نامساوی ماتریس خطی برای طراحی کنترلرهای مبتنی بر ناظر برای سیستم های خطی غیرقطعی، ارائه می شود. نشان داده ایم که استفاده معقولانه از رابطه یانگ (Young)، باعث بوجود آمدن شرایط LMI کمتر محدود کننده، شده است. مطالعه مقایسه ای نتایج ارائه شده در این پروژه با توجه به نتایج بیان شده در مقاله های دیگر، برتری روش طراحی پیشنهادی را نشان می دهد.
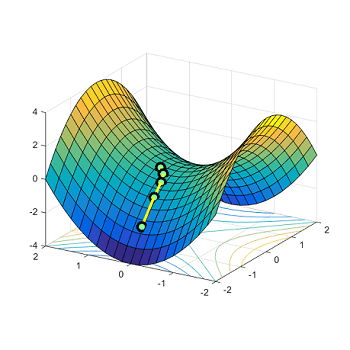
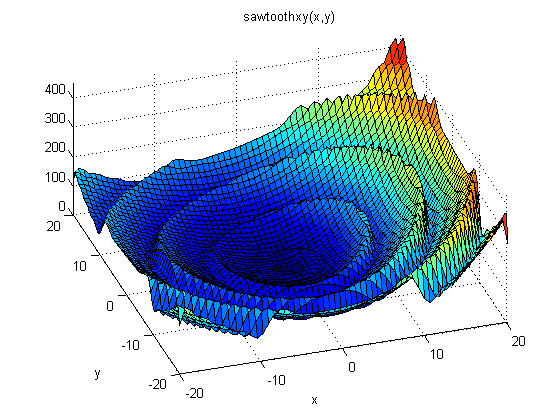
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.