دانلود شبیه سازی مقاله کنترل گشتاور موتور القایی با مدولاسیون بردار فضایی
| عنوان فارسی |
کنترل گشتاور مستقیم موتور القایی با استفاده از مدولاسیون بردار فضایی (SVM-DTC) |
| عنوان انگلیسی |
Direct Torque Control of Induction Motor Using Space Vector Modulation (SVM-DTC) |
| کلمات کلیدی |
کنترل گشتاور؛ موتور القایی؛ موتورهای AC؛ ماشین بردار پشتیبان؛ کنترل ولتاژ؛ تلفات کلیدزنی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2008 | تعداد رفرنس مقاله : 14 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Power System Conference (کنفرانس سیستم های قدرت) |
| ترجمه: ندارد | گزارشکار : دارد (گزارشکار مختصر 13 صفحه ای + فایل ویدئویی 1 دقیقه ای که نحوه اجرای شبیه سازی ها را نشان می دهد) | شبیه سازی : دارد (2 فایل شبیه سازی در سیمولینک متلب با فرمت .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
شبیه سازی کنترل گشتاور موتور القایی در متلب
موتورهای القایی، کاربردهای گسترده ای در درایوهای با عملکرد بالا دارند. پیشینه استفاده از این موتورها بسیار گسترده می باشد، مخصوصا در زمینه ابزارهای کنترلی. از این موتورهه بسته به درایوهای سرعت متغیر، در محیط های صنعتی، تجاری و خانگی استفاده می گردد. از آنجایی که این موتورها باید عملکرد کنترلی خوبی داشته باشند و همچنین دارای گشتاور دقیق و پاسخگویی شار بالای باشند، سیستم کنترلی حساس ترین بخش این موتورها محسوب می گردد.
DTC روشی برای کنترل ماشین با استفاده از گشتاور و شار موتور محسوب می گردد. طرح اصلی DTC شامل دو مقایسه کننده با مشخصه های مختلف، جدول کلیدزنی، اینورتر منبع ولتاژ (VSI)، بلوک برآورد گشتاور و شار و موتور القایی می باشد. این طرح در شکل زیر نشان داده شده است:
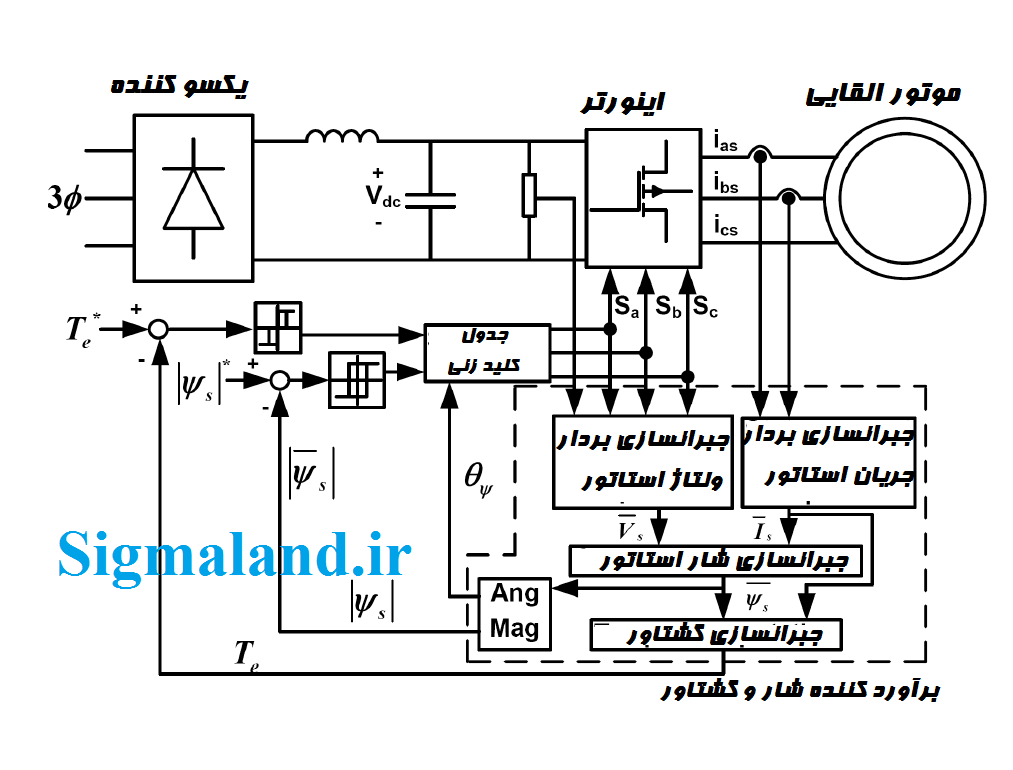
مانند هر روش کنترلی دیگری، DTC نیز مزایا و معایبی دارد. برخی از مزایای آن وابستگی کم به پارامترها، دقیق تر کردن سیستم و پیاده سازی آسان می باشد؛ معایب آن نیز کنترل سخت شار و گشتاور در سرعت پایین، اعوجاج جریان و گشتاور در طول تغییر بخش در حالت d-q، فرکانس کلیدزنی متغیر و ریپل گشتاور بالا می باشد. ریپل گشتاور موجب ایجاد نویزها و لرزش هایی می گردد که این خود باعث خطاهایی در درایوهای موتور بدون سنسور می شود. دلیل ریپل گشتاور و جریان زیاد در DTC، حضور مقایسه کننده های هیسترزیسی در کنار تعداد محدود بردارهای ولتاژی می باشد. به منظور کاهش ریپل گشتاور، بردار شار استاتور تغییر می کند که این موضوع نیازمند جبرانسازی خطای شار و گشتاور می باشد. اگر بردارهای ولتاژی زیادی در DTC استفاده شود، کنترل مناسب موتور نیز حاصل می گردد.
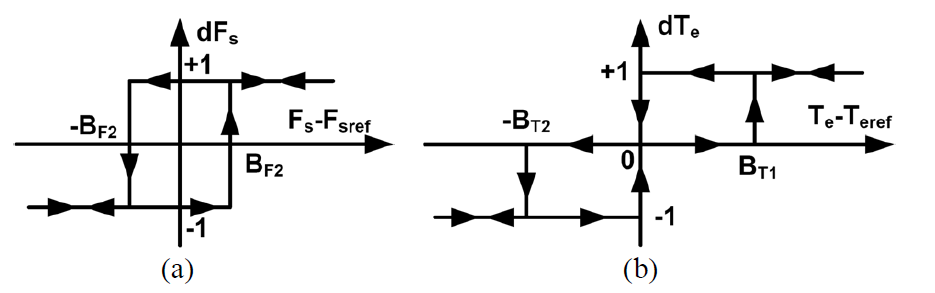
در شکل زیر، مقایسه کننده هیسترزیسی نشان داده شده هست، شکل (a) مربوط به شار استاتور و (b) مربوط به گشتاور می باشد.
در این پروژه، کنترل گشتاور مستقیم (DTC) در موتورهای القایی بر اساس مدولاسیون بردار فضایی (SVM) مورد بررسی قرار گرفته است. DTC روشی برای کنترل ماشین با استفاده از شار و گشتاور کنترل شده موتور می باشد. ریپل جریان و گشتاور در DTCهای معمولی رخ می دهد. دلیل ریپل جریان و گشتاور نامطلوب نیز تعداد کم بردارهای ولتاژی به کار رفته در موتور کنترل شده با روش های DTC متداول می باشد. SVM-DTC روشی برای کاهش ریپل است. این پروژه در محیط نرم افزار متلب شبیه سازی شده و نتایج آن نشان می دهند که ریپل جریان استاتور، شار و گشتاور با استفاده از روش بهبودیافته DTC کاهش می یابند.
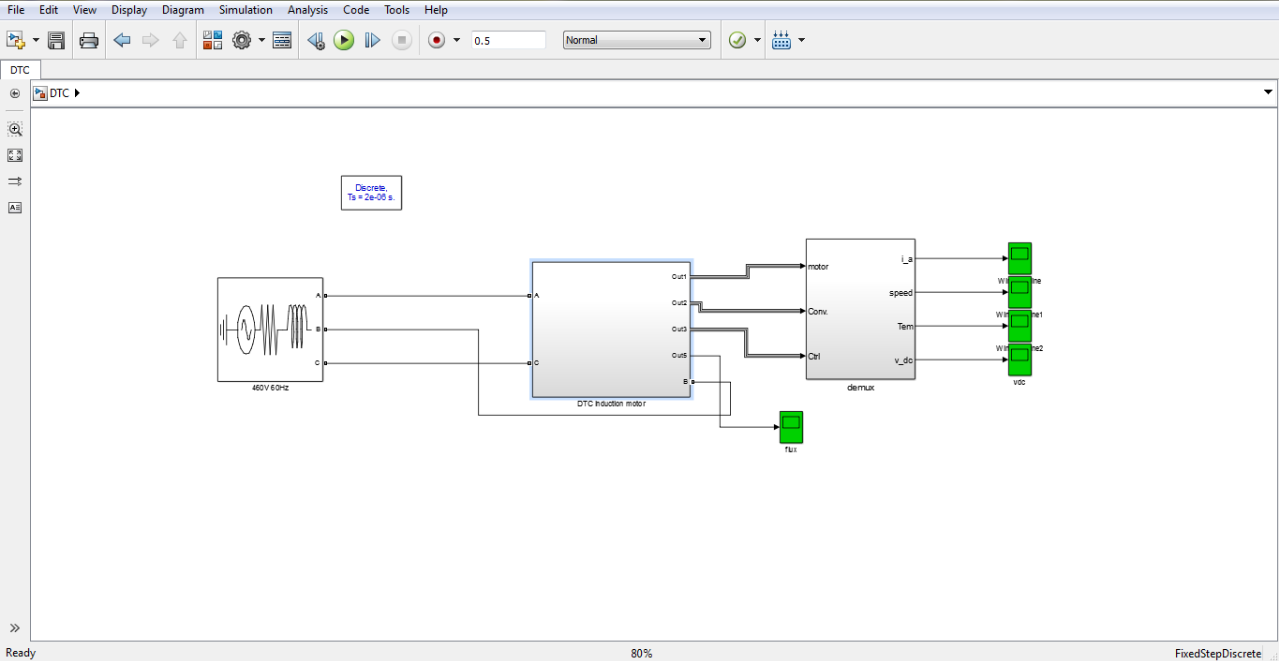
نمای کلی شبیه سازی DTC در محیط سیمولینک متلب در شکل زیر نشان داده شده است:
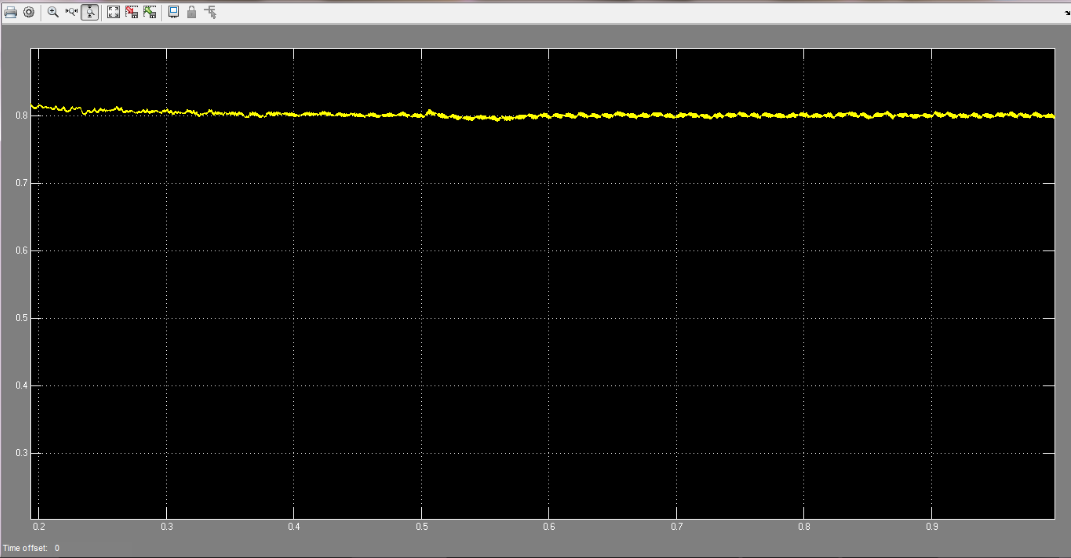
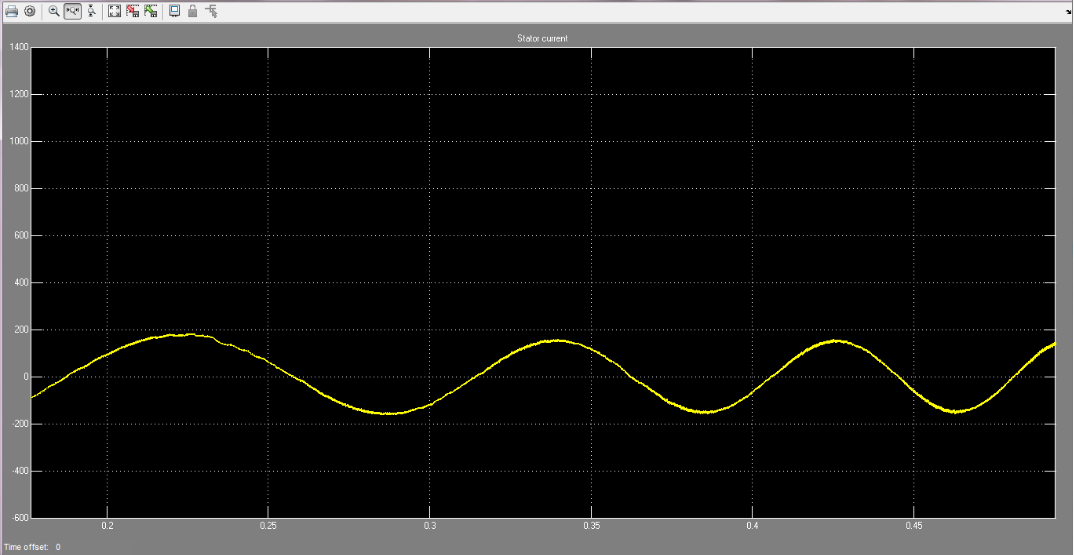
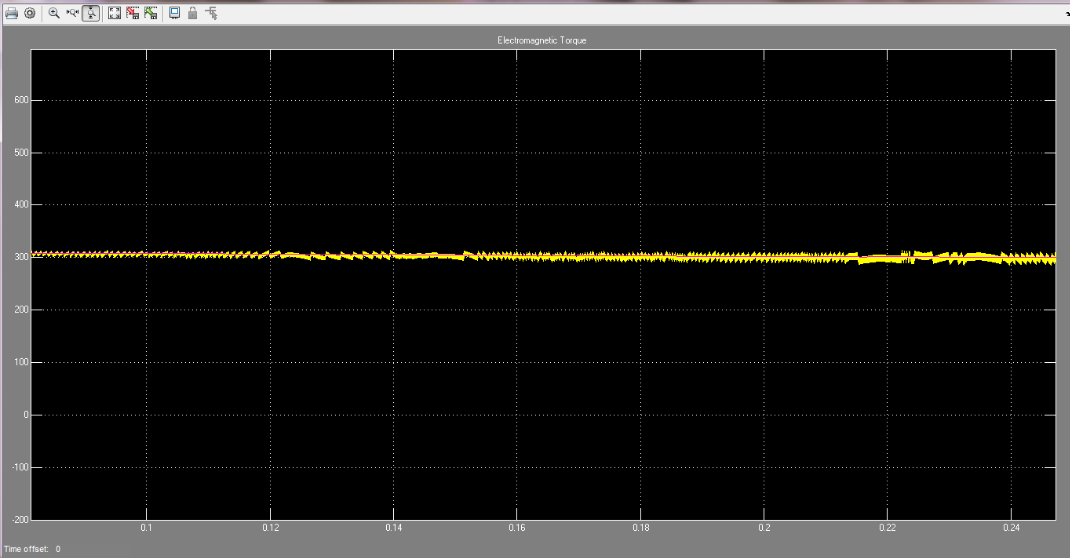
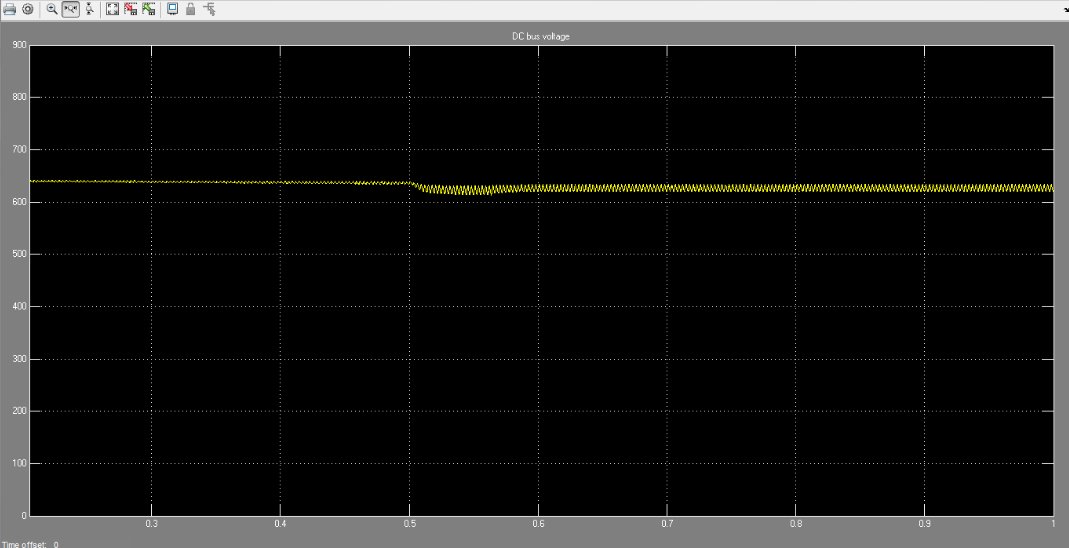
شکل های زیر نتایج حاصل از شبیه سازی در محیط MATLAB هستند:
شار:
جریان استاتور:
گشتاور:
ولتاژ لینک DC:

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.