
دانلود شبیه سازی مقاله کنترل گشتاور مستقیم در موتور سنکرون آهنربای دائم
| عنوان فارسی |
کنترل گشتاور مستقیم در موتور سنکرون آهنربای دائم |
| عنوان انگلیسی |
Direct Torque Control of Permanent Magnet Synchronous Motor |
| کلمات کلیدی |
کنترل گشتاور مستقیم؛ بردارهای فضایی استاتور؛ موتور سنکرون آهنربای دائم |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 4 | نشریه : IEEE |
| سال انتشار : 2010 | تعداد رفرنس مقاله : 7 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Chinese Control Conference (کنفرانس چینی کنترل) |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات و شکل موج های خروجی شبیه سازی در 5 صفحه) | شبیه سازی : دارد (یک فایل شبیه سازی در سیمولینک متلب با فرمت .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه کنترل گشتاور مستقیم در PMSM
موتورهای مغناطیس دائم (PMSM ها) کاربردهای گسترده ای در محرک های بسیار کارآمد مانند روبوت های صنعتی و ماشین ابزار دارند، که این بخاطر مزیت های آنها مانند تراکم توان بالا، گشتاور زیاد و عدم نیاز به تعمیر و نگهداری و غیره می باشد. در سالهای اخیر، قابلیت های مغناطیسی و حرارتی PM با بکارگیری مواد PM بسیار مغناطیس پذیر، افزایش قابل ملاحظه ای پیدا کرده اند. روش «کنترل مستقیم گشتاور» (DTC) اولین بار برای ماشین های القایی پیشنهاد شده است. همچنین این مفهوم را می توان برای درایوهای سنکرون مورد استفاده قرار داد. روش DTC با روش کنترل برداری متداول، که در آن گشتاور از طریق حلقه های کنترل جریان در قاب مرجع روتور کنترل می شود، متفاوت است. اما استراتژی DTC متداول ریپل های گشتاور الکترومغناطیس شدید و لاجرم شار پیوندی دارد و بنابراین عملکرد حالت پایدار آن ضعیف است و اینورتر فرکانس کلیدزنی متغیر دارد. محققان بسیاری تلاش خود را به بهبود عملکرد حالت پایدار DTC پایه، بخصوص برای ماشین القایی از زمان تولید اولین محصول صنعتی در سال 1996، اختصاص دادند. در اواخر دهه 1990، روش DTC برای موتور سنکرون مغناطیس دائم پیشنهاد شد که همچنین مزیت هایی برای موتور القایی داشت. با این حال، مسائلی جدید در مورد کاربرد بردارهای صفر پدیدار شدند. این امر بخصوص در سرعت های کم، هنگامی که کاربرد بردارهای ولتاژ صفر بر PMSM، بجای کاهش گشتاور آنرا ثابت نگه می دارد، صدق می کند. همچنین بهبود دینامیک ها، حذف بردارهای صفر نیز باعث بوجود آمدن ریپل گشتاور و شار بزرگتر در حالت پایدار می شود و کنترل هموار موتور در دامنه سرعت پایین را پیچیده می کند. بنابراین، روش کمینه سازی ریپل های گشتاور به موضوع پژوهشی اصلی در DTC برای PMSM، تبدیل شده است. DTC مدولاسیون بردار فضایی، روشی برای کاهش ریپل های گشتاور الکترومغناطیس و شار پیوندی می باشد. روش های مدولاسیون بردار فضایی چندین مزیت دارد که عبارتند از بهره برداری بهتر از شین DC، کاهش ریپل های گشتاور، کاهش اعوجاج هارمونیک کل در جریان موتور AC، کاهش تلفات کلیدزنی و پیاده سازی آسانتر در سیستم های دیجیتال.
در این پروژه، اصل FEV-DTC معرفی می شود و الگوریتمی جهت تخمین خطای شار پیشنهاد می شود. بردارهای ولتاژ سیستم FEV-DTC بوسیله خطای بردار شار استاتور جریان و بردار شار استاتور مرجع محاسبه می شود و بوسیله روش مدولاسیون بردار فضا، محقق می گردد. نتایج شبیه سازی نشان می دهند که سیستم DTC پیشنهادی شار پیوندی و ریپل گشتاور کمتری دارد و در عین حال پاسخ گشتاور، به خوبی DTC متداول حاصل می کند. علاوه بر آن، پیچیدگی مدار قدرت افزایش نمی یابد.
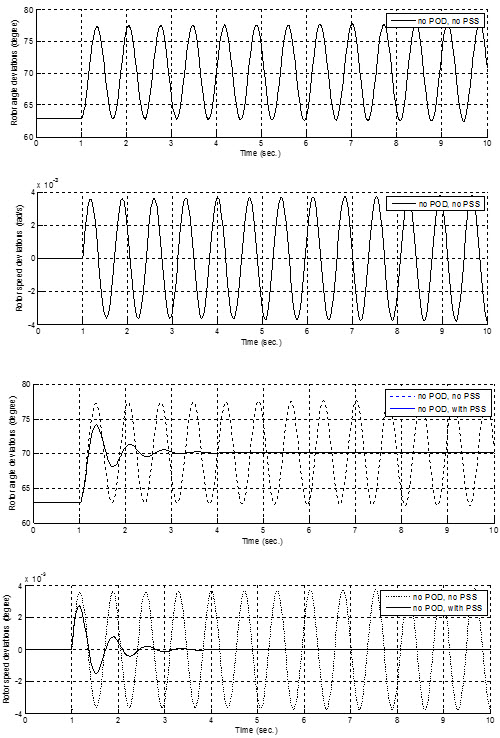
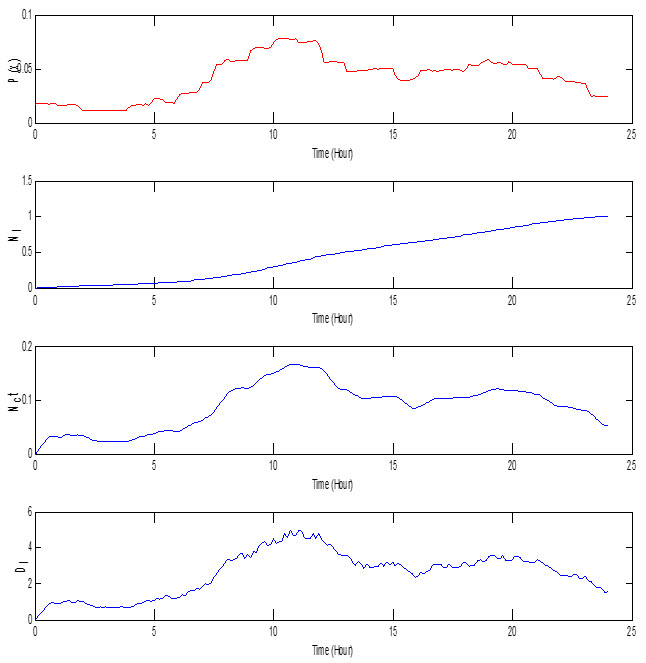
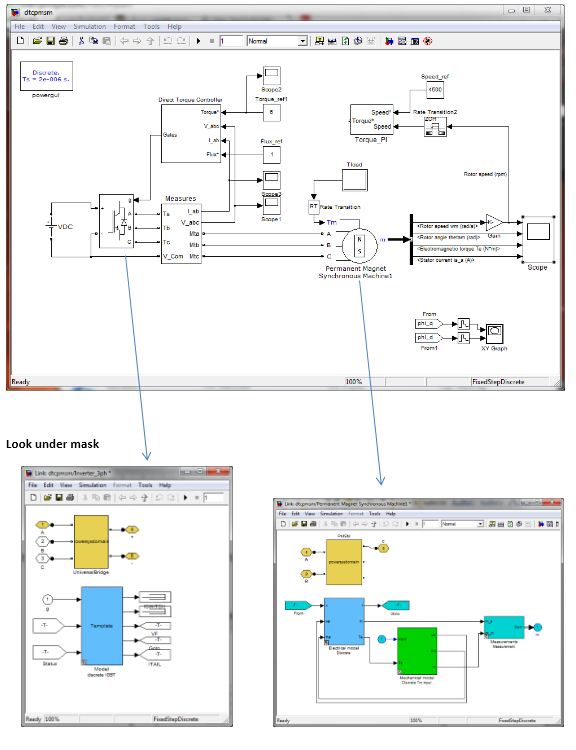
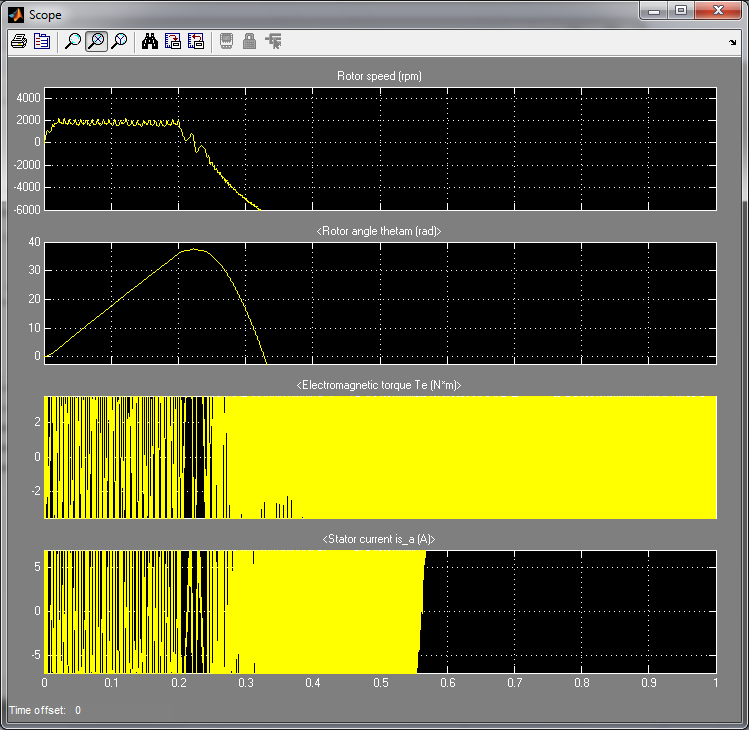
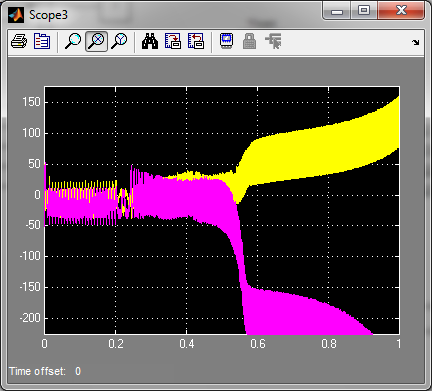
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج مربوط به خروجی های آن قرار داده شده است:


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.