
دانلود شبیه سازی مقاله روش تخمین حالت بر اساس فیلتر کالمن برای سیستم تاخیردار چند ورودی چند خروجی
| عنوان فارسی |
روش تخمین جدید بر اساس فیلتر کالمن برای سیستم های تاخیردار واحد چند-ورودی چند-خروجی |
| عنوان انگلیسی |
A New Kalman Filter Based State Estimation Method for Multi-input Multi-output Unit Time-Delay Systems |
| کلمات کلیدی |
فیلتر کالمن، تخمین حالت، سیستم افزوده، تاخیر زمانی |
| درسهای مرتبط |
پردازش سیگنال |
| تعداد صفحات انگلیسی : ۸ | نشریه : Springer |
| سال انتشار : ۲۰۱۳ | تعداد رفرنس مقاله : ۱۶ |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : Matlab | نام مجله مقاله : Indian Journal of Science and Technology |
| ترجمه: ندارد | گزارشکار : دارای گزارش فارسی است | شبیه سازی : در نرم افزار متلب |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
تخمین حالت در سیستم چند ورودی-خروجی بر اساس فیلتر کالمن
مدل های فضای حالت در بسیاری از زمینه ها کاربرد گسترده ای دارند، مانند شناسایی سیستم، فیلتر منطبق، مدل سازی و کنترل سیستم، سیستم های انرژی و قدرت و نیز پردازش سیگنال. بسیاری از مطالعات در زمینه سیستم های با تاخیر زمانی تاکید برطرح های کنترلی است.
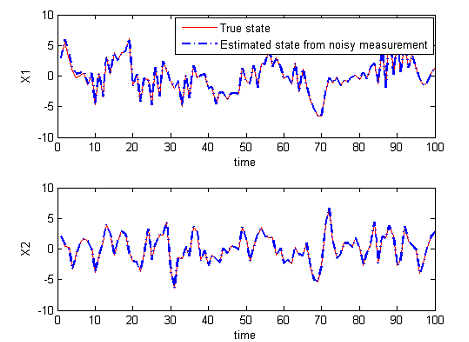
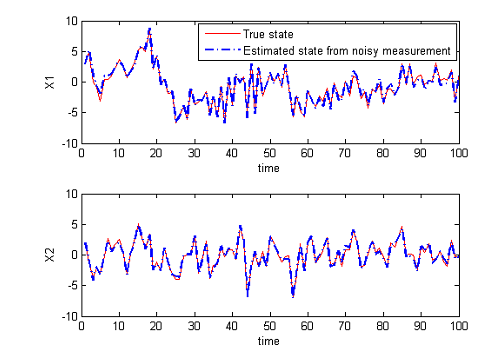
در این مقاله یک روش تخمین عمومی جدید برای سیستم های تأخیر زمان واحد ارائه شده است. فیلتر کالمن به منظور تخمین حالت های یک سیستم خطی با تأخیر زمان واحد مورد استفاده قرار گرفته است. ابتدا یک بردار حالت تکامل یافته تعریف می شود که شامل بردار حالت اصلی و بردار حالت با یک تاخیر زمان واحد است. وضعیت سیستم اضافه شده با استفاده از الگوریتم فیلتر کالمن برآورد می شود. از بردار حالت افزوده شده، می توان بردار حالت اصلی را بدست آورد. شبیه سازی ها در نرم افزار متلب انجام شده است و بخضی از نتایج در ادامه نشان داده شده است.
تاخیر دار
تخمین حالت


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.