
دانلود شبیه سازی مقاله تشخیص رنگ و شکل هندسی دو بعدی با پردازش سیگنال دیجیتال
| عنوان فارسی |
تشخیص رنگ و شکل هندسی دو بعدی با استفاده از پردازش سیگنال دیجیتال |
| عنوان انگلیسی |
2 D Geometric Shape and Color Recognition Using Digital Image Processing |
| کلمات کلیدی |
جعبه محدود کننده؛ بسط؛ متلب (MATLAB)؛ جبرانسازی چرخش؛ تشخیص رنگ و شکل |
| درسهای مرتبط |
پردازش تصویر |
| تعداد صفحات انگلیسی : 9 | نشریه : Semantic Scholar |
| سال انتشار : 2013 | تعداد رفرنس مقاله : 14 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Journal of Advanced Research in Electrical, Electronics and Instrumentation Engineering (مجله بین المللی تحقیقات پیشرفته در مهندسی برق ، الکترونیک و ابزار دقیق) |
| ترجمه: ندارد | گزارشکار : دارد ( به صورت مختصر ارائه شده است ) | شبیه سازی : دارد (ام فایل متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
شبیه سازی تشخیص رنگ و شکل با پردازش سیگنال
در صنایع پیشرفته و خودکار امروزی، روش های بسیار کارآمد و موثری برای فرآیندهای تولید و بازرسی دقیق استفاده می شود. زمانی بود که کارهایی مثل بازرسی کیفیت، مرتب سازی، مونتاژ، نقاشی، بسته بندی و غیره به صورت دستی انجام میشد. ولی پس از ورود سریع ربات ها به صنعت، صنعت اتوماسیون دستخوش تغییرات زیادی شد.
در این بین، سنسورها نقش مهمی در ارائه اطلاعات مرتبط به پارامترها در طول فرآیندهای اجرا ایفا می نمایند. دما، نور، درصد ترکیب مواد، رطوبت، شکل و رنگ ساختارها از جمله پارامترهایی هستند که سنسورها می توانند تشخیص دهند. سنسورهای بسیار دقیق نیز بازخوردهای بهتر را در اختیار کنترل کننده قرار می دهند. به عنوان مثال، هرچه دقت یک سنسور بیشتر باشد، توانایی سنسور در تشخیص خطا نیز بیشتر خواهد بود.
رشته پردازش سیگنال، کاربردهای زیادی در زمینه اتوماسیون پیدا کرده است. سنسورهای دوربین، ویدئوها و تصاویر اشیای متحرک روی نقاله را به طور زنده ضبط می نمایند. سپس این ویدئوها و تصاویر به منظور تشخیص اشیا و مقایسه آنها با موارد از پیش تعریف شده استفاده می شوند. با توجه به میزان شباهت ها و تفاوت های بین تصویر و مقدار از پیش تعیین شده نیز تصمیماتی توسط ماشین اتخاذ می گردد. نهایتا نیز این تصمیم به بازوی رباتیک داده می شود که اگر شیء واجد شرایط بود عبور کند و اگر مناسب نبود به سطل زباله انتقال داده شود.
در این پروژه نیز سعی شده تا با استفاده از یک سری شبیه سازی ها و الگوریتم ها، اطلاعات مربوط به هر کدام از تصاویر اتخاذ شده و تصمیماتی بر اساس معیارهای قبلی اتخاذ گردد.
در فلوچارت زیر مراحل مختلف مربوط به پردازش نشان داده شده است:
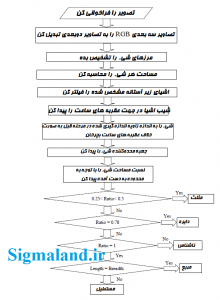
در این پروژه، روش مربوط به استفاده از پردازش سیگنال و منطق هندسی برای تشخیص اشکال دو بعدی مانند مربع، دایره، مستطیل و مثلث و نیز رنگ آنها تشریح شده است. این روش را می توان روی کاربردهایی چون بینایی ربات و هوش رایانه بسط داد. این روش شامل تبدیل تصاویر سه بعدی RGB به تصاویر سیاه و سفید معمولی، طبقه بندی پیکسل رنگ ها برای جداسازی پیش زمینه شیء، فیلترینگ بر اساس مساحت، و استفاده از جعبه محدودکننده و مشخصه های آن برای محاسبه معیارهای مربوط به شیء. این معیارها با مقادیر از پیش تعیین شده مقایسه می شوند. تشخیص شکل اشیا با استفاده از چرخش شیء مشخص می شود. رنگ اشیا نیز با آنالیز اطلاعات RGB مربوط به همه پیکسل های شیء شناسایی می گردد. این الگوریتم با استفاده از نرم افزار متلب (MATLAB) شبیه سازی شده است و دقتی در حدود 99 درصد را ارائه می دهد.
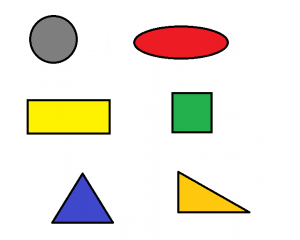
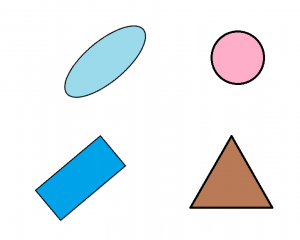
در ادامه بخشی از نتایج خروجی شبیه سازی نشان داده شده است:




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.