
دانلود شبیه سازی مقاله کنترل جبرانسازی اصطکاک برای فرمان برقی
| عنوان فارسی |
کنترل جبرانسازی اصطکاک برای فرمان برقی |
| عنوان انگلیسی |
Friction Compensation Control for Power Steering |
| کلمات کلیدی |
قطعات خودرو؛ غیرخطی های کنترل؛ اصطکاک؛ سیستم های کنترل غیرخطی؛ فرمان برقی (PS)؛ سیستم های مرتبه کاهش یافته؛ حلقه های ردیابی |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 14 | نشریه : IEEE |
| سال انتشار : 2015 | تعداد رفرنس مقاله : 38 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Control Systems Technology (مجله تکنولوژی سیستم های کنترلی) |
| ترجمه: ندارد | گزارشکار : ندارد | شبیه سازی : دارد (فایل های شبیه سازی در نرم افزار متلب با فرمت .m و .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب فرمان برقی
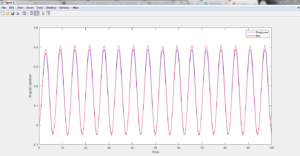
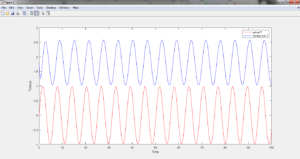
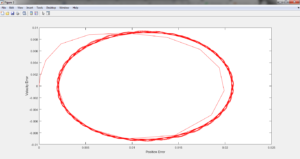
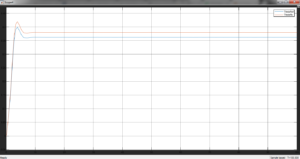
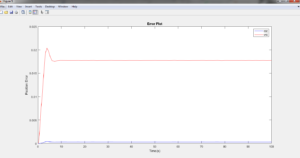
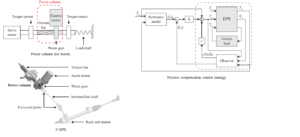
اثرات اصطکاک، برای دینامیک های «فرمان برقی» (EPS)، بسیار مهم هستند. از یک سو، اصطکاک در پایداری سیستم مشارکت می کند و مقداری از آشفتگی ها (ارتعاشات جاده و غیره) را فیلتر می کند. از سوی دیگر، تاثیر منفی بر حس رانندگی می گذارد و از تنظیم دقیق فرمان جلوگیری می کند. علاوه بر آن، برای شرکت های سازنده فرمان، اصطکاک از توسعه و تنظیم دقیق استراتژی دستیاری، جلوگیری می کند. بنابراین، کنترل یا در نهایت سرکوب اصطکاک در EPS یک چالش واقعی است. در این مقاله، یک استراتژی کنترل برای جبرانسازی اکتیو اصطکاک در EPS نوع مساعدت ستونی، ارائه می شود. موتور کمکی و واحد کنترل الکترونیک، برای حذف اثر اصطکاک مورد استفاده قرار می گیرند تا رفتار یک سیستم بدون اصطکاک ایده آل، تقلید و شبیه سازی شود. امکان پذیری این استراتژی برروی ستون قدرت (قسمت بالایی سیستم فرمان) با استفاده از اطلاعات (سیگنال های) یکسان با اطلاعات موجود در یک محصول واقعی، نشان داده می شود. کنترل پیشنهادی براساس مدلی از ستون قدرت شامل نیروهای اصطکاک وابسته به لغزش و بار، می باشد. به این منظور، یک مدل شبیه سازی تفصیلی، که در یکی از مقاله های قبلی، توسعه و اعتباریابی شده، به یک مدل مرتبه پایین تر ساده سازی می شود تا محاسبه بلادرنگ ممکن شود. برای محاسبه نیروهای اصطکاک ایستا و پویا با فرمولاسیون پیوسته از مدل LuGre استفاده می شود. معماری کنترل از دو حلقه بازخورد آبشاری (یعنی سری) تشکیل شده است. حلقه داخلی، اصطکاک داخلی سیستم را برآورد می کند و آنرا از طریق ورودی موتور، جبرانسازی می کند. حلقه بیرونی حاوی یک مدل مرجع بدون اصطکاک استفاده شده به عنوان یک برنامه ریز مسیر و یک کنترلر خطی، می باشد که تلاش می کند خطای بین سیستم و پاسخ های مرجع را کمینه کند. پایداری و استواری استراتژی کنترل، به صورت رسمی تحلیل می شوند. مخصوصاً اینکه، نشان داده شد که حد خطا بین سیستم و پاسخ های مرجع را می توان به میزان دلخواه با مقادیر مناسب بهره ها، کوچک نمود. نتایج تجربی نشان می دهند که این استراتژی کنترل در ردیابی مسیر مرجع بدون اصطکاک، موفق است و استواری در برابر پارامترهای اصطکاک غیردقیق را تایید می کند.
این مقاله در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصاویر مربوط به خروجی های شبیه سازی قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.