
دانلود شبیه سازی مقاله تعیین موقعیت گره در شبکه های خودرویی با اندازه گیری فاصله بین گره ها
| عنوان فارسی |
تعیین موقعیت گره همکارانه در شبکه های خودرویی با استفاده از اندازه گیری فاصله بین گره ها |
| عنوان انگلیسی |
Cooperative node positioning in vehicular networks using inter-node distance measurements |
| کلمات کلیدی |
وسایل نقلیه؛ جاده؛ سیستم موقعیت یابی جهانی؛ فیلترهای کالمن؛ اندازه گیری فاصله؛ دقت؛ استانداردها |
| درسهای مرتبط |
مهندسی کامپیوتر |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2014 | تعداد رفرنس مقاله : 17 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC) (سمپوزیوم بین المللی IEEE در زمینه ارتباطات رادیویی شخصی، داخلی و سیار (PIMRC)) |
| ترجمه: ندارد | گزارشکار : دارد (گزارشکار مختصر 4 صفحه ای در قالب فایل PDF در مورد توضیحات مربوط به شبیه سازی) | شبیه سازی : دارد (10 فایل شبیه سازی در متلب با فرمت .m) |
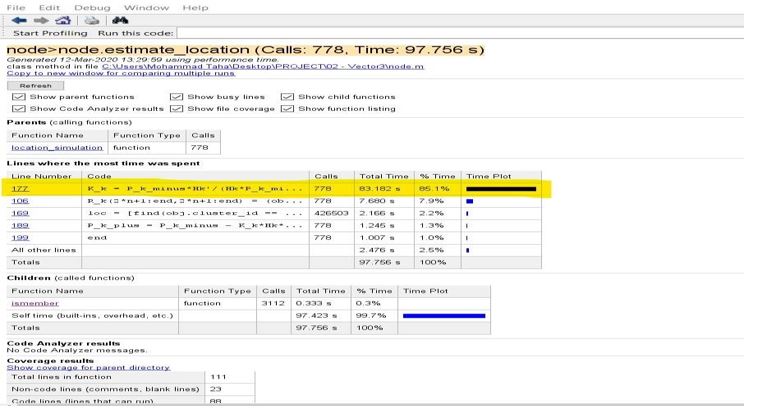
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب موقعیت یابی گره در شبکه خودرویی
در اکثر کاربردهای «شبکه های ادهاک خودرویی» (VANET ها) لازم است تا موقعیت وسایل نقلیه به صورت دقیق و بی وفقه برآورد شود. برای نمونه، مکان دقیق یک تصادف باید بین وسایل نقلیه ای که به صحنه تصادف می رسند، توزیع شود. در شرایط متداول، مکان یک وسیله نقلیه بوسیله ادوات GPS یافت می شود. با این حال، لازم است GPS خط دید به حداقل چهار ماهواره موقعیت یابی داشته باشد که این امر دسترسی و دقت این فناوری در مناطق تحت پوشش و حومه های شهری که پر از ساختمان های مرتفع هستند را محدود می کند.
این شبیه سازی در محیط متلب (MATLAB) انجام شده و در ادامه نیز بخشی از تصاویر خروجی شبیه سازی قرار داده شده است:
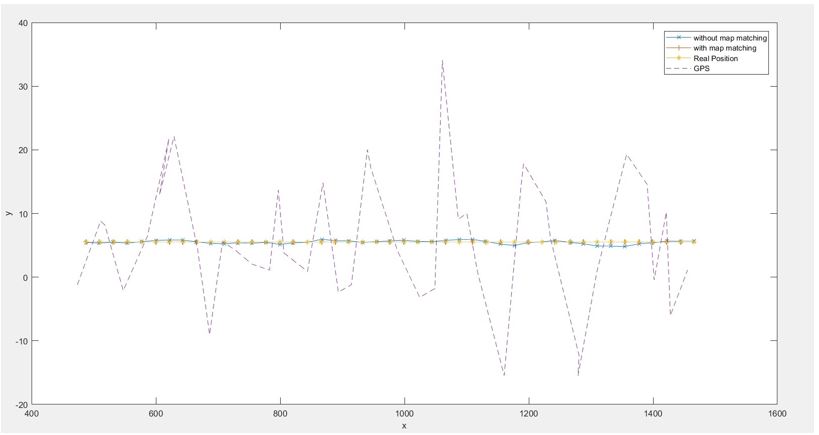
این پروژه متلب، یک الگوریتم موقعیت یابی توزیع شده نوین برای برآورد مکان در شبکه های خودرویی را ارائه می دهد. در اینجا، یک روش فاصله یابی دقیق پیشنهاد شده است که از «کدهای متعامد مثبت» (POC) همگام استفاده می کند. در کدهای POC، گره ها از کلاک پالس GPS برای همگامی و ارسال بسته های داده هایشان برروی فریم های خاص، استفاده می کنند. می توان از «تفاضل زمان رسیدن» برای تخمین فاصله بین هر جفت فرستنده-گیرنده استفاده نمود. این رویکرد، یک راه حل فاصله یابی راحت فراهم می کند و بنابراین نیاز به رادارهای فاصله یابی فرکانس بالای گرانقیمت را برطرف می کند. سپس اطلاعات فاصله یابی همراه با برآوردهای GPS در یک فیلتر کالمن نیمه تعمیم یافته مورد استفاده قرار می گیرند. در این فیلتر، تقریب خطی تنها برای مقطع غیرخطی بردار حالت بکار گرفته می شود. موقعیت تخمینی خودرو سپس با نقشه محلی مقایسه می شود تا برونهشته های بیشتری حذف شوند. روش تطبیق با نقشه پیشنهادی، مرزهای جاده و جهت حرکت را بطور همزمان مدنظر قرار می دهد. این روش از مکانیابی گره های دارای جهت اشتباه جلوگیری می کند، بخصوص هنگامی که گره ها نزدیک به یک تقاطع باشند. نتایج شبیه سازی نشان می دهند که روش مکانیابی ما عملکرد بهتری نسبت به دیگر روش های موقعیت یابی مشارکتی دارد.


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.