دانلود شبیه سازی مقاله کنترل بهینه غیر خطی پاندول معکوس سیستم های دینامیکی با استفاده از کنترلر PID و LQR
| عنوان فارسی |
مدلسازی و شبیه سازی برای کنترل بهینه از سیستم دینامیکی پاندل معکوس غیر خطی با استفاده از کنترل کننده PID و LQR |
| عنوان انگلیسی |
Modelling & Simulation for Optimal Control of Nonlinear Inverted Pendulum Dynamical System using PID Controller & LQR |
| کلمات کلیدی |
آونگ معکوس سیستم غیر خطی؛ کنترل PID؛ کنترل بهینه؛ LQR |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 6 | نشریه : 2012 Sixth Asia Modelling Symposium |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 21 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات شبیه سازی در 11 صفحه) | شبیه سازی : دارد (فایل های شبیه سازی در متلب با فرمت .m و .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل بهینه lqr
این مقاله در رابطه با کنترل بهینه غیر خطی پاندول معکوس مختص سیستم های دینامیکی است که در آن پاندول معکوس به جرم m و به طول l لحاظ شده است که می تواند بر روی ارابه ای به جرم M حرکتی از نوع افقی داشته باشد.
جهت حرکت این جرم بر روی ارابه نیاز به نیروی اعمالی F است که این عمل باعث حرکت ارابه و تعادل پاندول معکوس خواهد شد.
در اکثر شبیه سازی مقاله ها فرضیات مختلفی لحاظ می گردد و در این مسئله فرض شده است که میله پاندول دارای جرم بسیار اندک می باشد و اصطکاک وجود ندارد.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) شبیه سازی شده و در ادامه نیز تعدادی از تصاویر خروجی شبیه سازی قرار داده شده است:
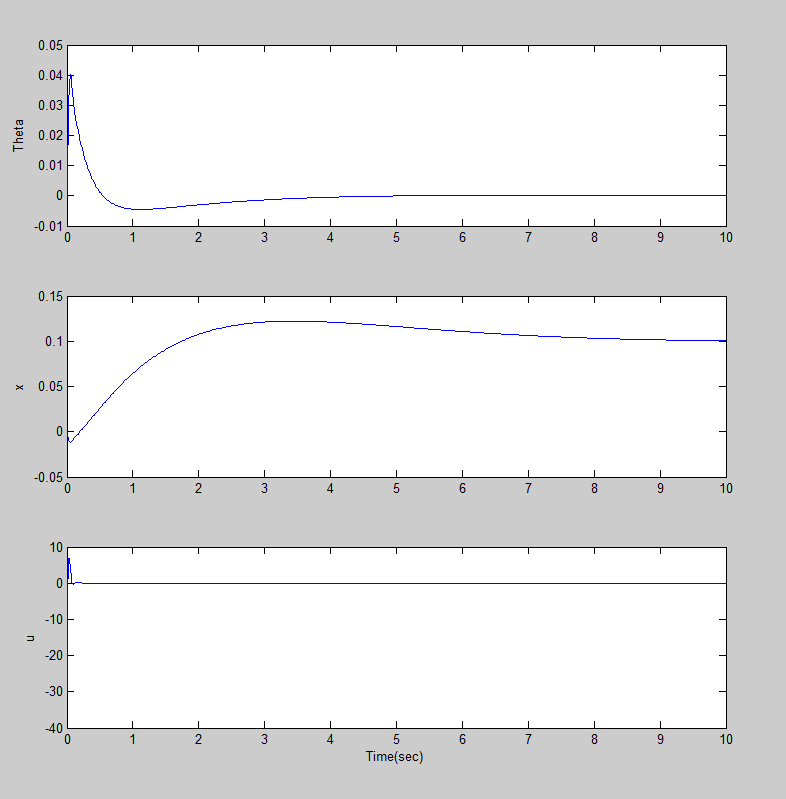
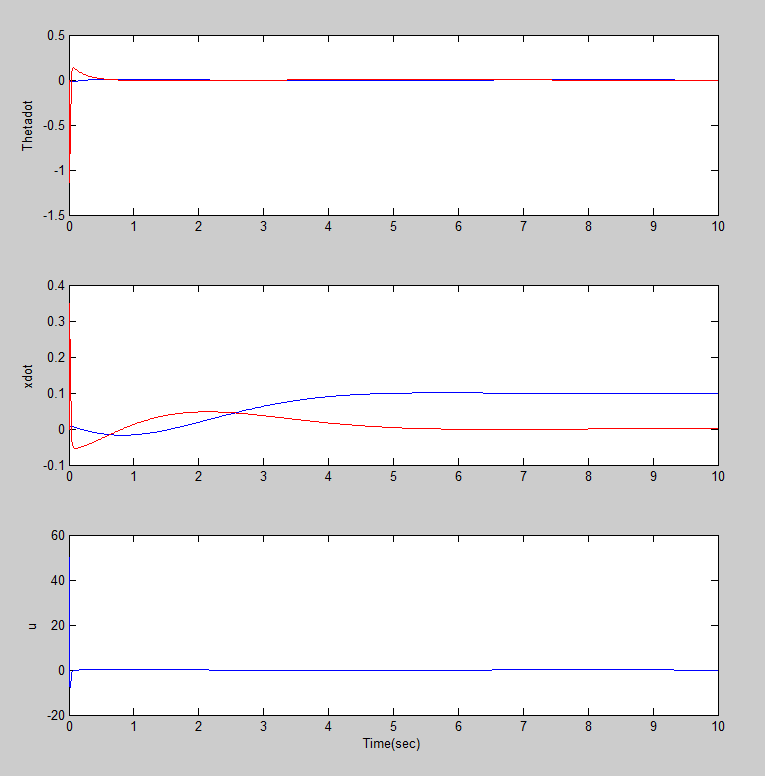
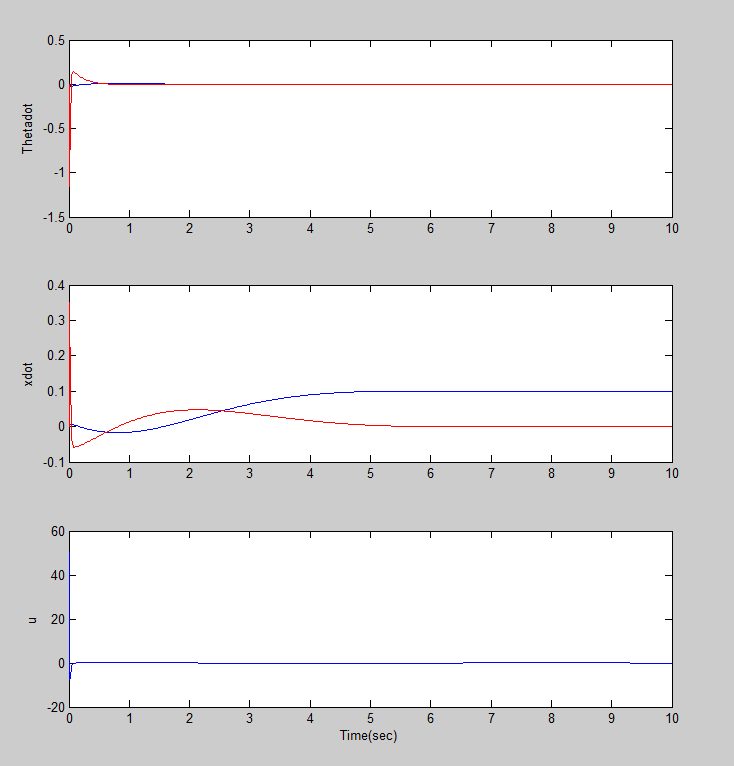
همچنین با استفاده از کنترلر بهینه lqr و pid نیر مقاله بررسی شده و در matlab پیاده سازی شده است.



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.