دانلود شبیه سازی مقاله اجماع عوامل درجه اول با اطلاعات دارای تاخیر همسایگان
| عنوان فارسی |
اجماع عوامل درجه اول با اطلاعات دارای تاخیر همسایگان |
| عنوان انگلیسی |
Consensus of First-order Agents with Neighbors' Delayed Information |
| کلمات کلیدی |
اجماع؛ سیستم های چند عاملی؛ تاخیر ارتباطات؛ توپولوژی بدون جهت |
| درسهای مرتبط |
مخابرات |
| تعداد صفحات انگلیسی : 5 | نشریه : IEEE |
| سال انتشار : 2017 | تعداد رفرنس مقاله : 18 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Chinese Automation Congress (CAC) (کنگره اتوماسیون چین) |
| ترجمه: ندارد | گزارشکار : دارد (فایل راهنمای 8 صفحه ای) | شبیه سازی : دارد (یک فایل سیمولینک متلب با فرمت .mdl و یک فایل با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه سیستم های چند عاملی
اخیراً، محققان بیشتری به اجماع سیستم های چندعاملی توجه پیدا کرده اند که علت آن، دامنه گسترده کاربردهایش می باشد. اجماع، به معنای طراحی الگوریتم یا پروتکل مناسب است تا تضمین شود که همه عامل ها (بازیگران) می توانند به یک اتفاق نظر در مورد کمیت های معین مدنظر دست پیدا کنند.
این پروژه، به مساله اجماع برای سیستم های چندعاملی مرتبه اول عمومی در مورد توپولوژی غیرجهت دار، می پردازد. تحت این فرض که این توپولوژی، همبند است و هر عامل اطلاعات همسایگان را با تاخیر ارتباطاتی متغیر با زمان دریافت می کند، حد تاخیر مجاز براساس دینامیک های عامل، ساختار توپولوژی و بهره کنترلی بدست می آید. بخصوص اینکه، در مورد سیستم های انتگرال گیر مرتبه اول، هرگونه تاخیر بزرگ اما محدود، برای اجماع، تحمل می شود. در نهایت، اثربخشی نتیجه نظری از طریق مثال عددی نشان داده می شود.
در این پروژه، مسئله اجماع همراه با اطلاعات تاخیردار همسایگان را مورد ملاحظه قرار می دهیم. تحت این فرض که تاخیر، متغیر با زمان است و شبکه غیرجهت دار، شرایط اجماع برای دینامیک های بازیگر ناپایدار، فراهم می شوند. شایان ذکر است که نتایج پیشنهادی برای توپولوژی جهت دار و برداری، کاربرد دارند.
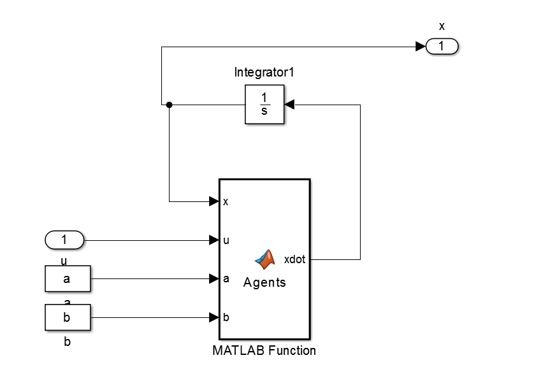
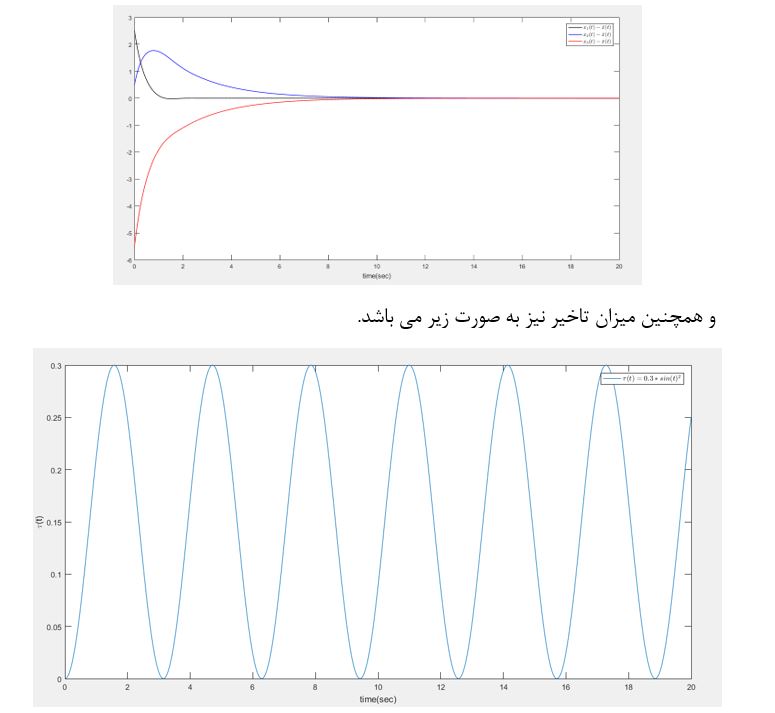
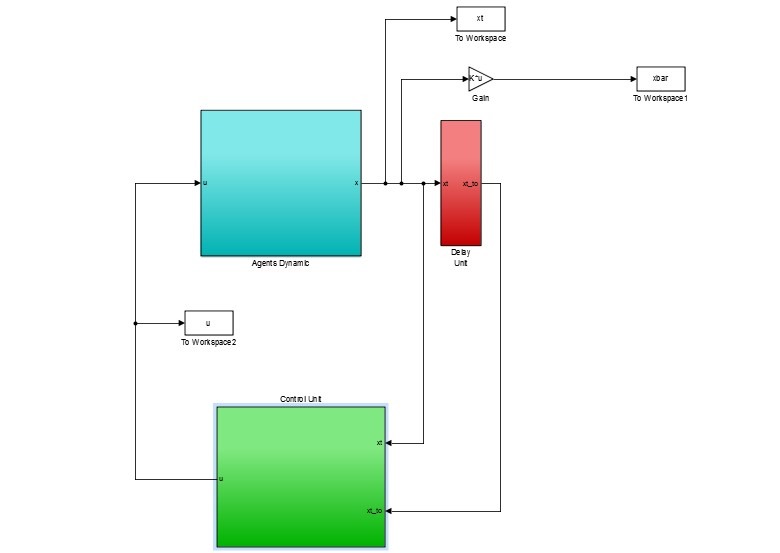
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به شبیه سازی قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.