دانلود شبیه سازی مقاله اکتشافات مستقل دریایی با Lidar و SLAM
| عنوان فارسی |
اکتشافات مستقل دریایی با استفاده از Lidar و SLAM |
| عنوان انگلیسی |
Marine Autonomous Exploration Using a Lidar and SLAM |
| کلمات کلیدی |
کشتی سطحی در مقیاس مدل؛ طراحی سیستم کنترلی؛ محیط دریایی |
| درسهای مرتبط |
مخابرات |
| تعداد صفحات انگلیسی : 10 | نشریه : ASME |
| سال انتشار : 2017 | تعداد رفرنس مقاله : 17 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Ocean, Offshore and Arctic Engineering (کنفرانس بین المللی مهندسی اقیانوس، دریا و قطب) |
| ترجمه: ندارد | گزارشکار : ندارد | شبیه سازی : دارد (فایل های شبیه سازی در نرم افزار متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب اکتشافات دریایی
در تعدادی از سناریوها، اکتشاف مستقل با استفاده از لیدارها در روباتهای زمینی با موفقیت صورت گرفته است، به طور مثال لیدارها بر روی کشتیهای دریایی مورد استفاده قرار گرفته اند، و در برخی پروژه ها نیز از یک لیدار سه بعدی استفاده شده است. با این وجود، یافتن نمونههایی که در آن، لیدارها بر روی کشتیهای سطحی دریایی با هدف کاوش مستقل محیط آن پیادهسازی شدهاند، با دشواری هایی همراه است. در واقع، اکتشافات مستقل/ خودگردان دریایی با استفاده از لیدار دوبعدی و مکانیابی و نگاشت همزمان (SLAM) برای نویسندگان بهترین دانشی است که قبلاً محقق نشده است. یک آنالوگ به کشتی سطحی دریایی مورد مطالعه در این گزارش، وسایل نقلیه زمینی است که در آن لیدارهای دوبعدی به شکل گسترده و فزایند ای مورد استفاده قرار گرفتهاند. به طور خاص، منابع متعدد، نگاشت را با استفاده از لیدارهای نصب شده روی روبات های چرخدار با استفاده از سیستم عامل روبات (ROS) و نرم افزار منبع باز SLAM تعریف می کنند. این موارد به عنوان یک الهام برای پروژه اصلی نویسندگان اصلی عمل کردند که نتایج اصلی آن در این مقاله ارائه شده است. لازم به ذکر است که برای سهولت اجرای الگوریتم های نگاشت منبع باز، ROS به عنوان پلت فرم برنامه نویسی سیستم مورد بررسی در این مقاله انتخاب شد. علاوه بر این، پلتفرم ROS، بیشتر یک ادغام ساده با متلب/ سیمولینک را پشتیبانی می کند که در آن بیشتر سیستم کنترل طراحی شده است.
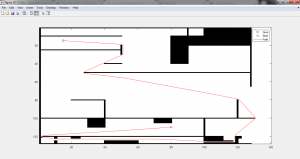
این پروژه به شرح و بررسی پیاده سازی یک لیدار 2 بعدی در یک کشتی سطحی در مقیاس مدل، و طراحی یک سیستم کنترلی می پردازد که این امکان را برای کشتی فراهم می کند تا با استفاده از لیدار و SLAM، اکتشاف مستقل یک محیط دریایی در مقیاس کوچک را انجام دهد. همچنین، در این مقاله مباحثی نیز در زمینه نتایج تجربی ارائه می شود. تکمیل این سیستم شامل توسعه یک سیستم کنترل مناسب است که استراتژیهای اکتشاف، برنامهریزان مسیر، کنترل کننده حرکت و استراتژی ایجاد نقاط تنظیم کنترلکننده را با یکدیگر ادغام میکند. علاوه بر این، این سیستم بر روی پلتفرم سیستم عامل روبات پیاده سازی شد و استفاده از الگوریتم های منبع باز را برای پیشرفته ترین SLAM امکانپذیر نمود.
این مقاله مربوط به سال 2017 بوده و شبیه سازی آن در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تصویر مربوط به خروجی شبیه سازی قرار داده شده است:



دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.