
دانلود شبیه سازی مقاله کنترل فیدبک خروجی مبتنی بر شبکه عصبی در سیستم چند عاملی
| عنوان فارسی |
کنترل تشکیل فیدبک خروجی وفقی مبتنی بر شبکه عصبی در سیستم های چند عاملی |
| عنوان انگلیسی |
Neural network-based adaptive output feedback formation control for multi-agent systems |
| کلمات کلیدی |
سیستم های چند عاملی؛ کنترل تشکیل؛ فیدبک خروجی؛ شبکه عصبی چبیشف (Chebyshev) |
| درسهای مرتبط |
کنترل |
| تعداد صفحات انگلیسی : 14 | نشریه : Springer |
| سال انتشار : 2012 | تعداد رفرنس مقاله : 32 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Nonlinear Dynamics (دینامیک غیرخطی) |
| ترجمه: ندارد | گزارشکار : فایل راهنما دارد (21 صفحه ای و 13 صفحه ای) (در یک فایل ویدئویی 5 دقیقه ای نیز، نحوه ران کردن شبیه سازی ها نشان داده شده است) | شبیه سازی : دارد (فایل های شبیه سازی در نرم افزار متلب با فرمت .m و .mdl) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کنترل فیدبک در سیستم چند عاملی
کنترل مشارکتی سیستم های چندعاملی، در چند سال گذشته توجه پژوهشی بسیاری را به خود جلب کرده است و در چندین زمینه متنوع، مانند چندین ربات، وسایل نقلیه هوایی بدون سرنشین، وسایل نقلیه زیرآبی خودمختار و فضاپیما، بکارگرفته شده اند. استراتژی ها و رویکردهای مختلف، که طبق معماری کنترلی خود به رهبر-پیرو، ساختار مجازی و رفتاری، تقسیم بندی می شوند، برای کنترل تشکیل (formation)، پیشنهاد شده اند. اکثر رویکردهای موجود در مورد کنترل تشکیل سیستم های چندعاملی، باید فرض کنند که همه حالت ها یا وضعیت های عامل ها، برای بازخورد و تبادل بین عامل های مجاور، موجود می باشند.
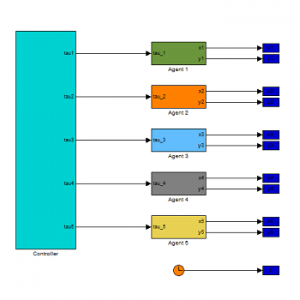
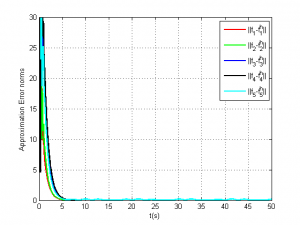
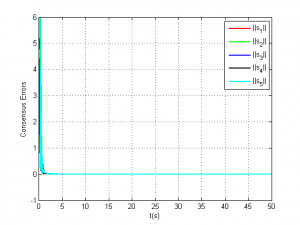
این پروژه، مسئله کنترل ردیابی تشکیل بازخورد خروجی برای سیستم های چندعاملی مرتبه دوم تحت گراف متصل جهت دار و در حضور عدم قطعیت های دینامیک و آشفتگی برونی کراندار، را بررسی می کند. دو معیار خطای ردیابی حالت (یعنی خطاهای ردیابی حالت مطلق و نسبی) برای هر عامل در تشکیل، مورد ملاحظه قرار می گیرند و ناظرهای مرتبه پایین تر خطی براساس خطاهای ردیابی وضعیت جمعی که شامل خطاهای ردیابی وضعیت مطلق و نسبی هستند، ساخته می شوند. شبکه های عصبی چبیشوف برای تقریب تابع غیرخطی مجهول در دینامیک عامل آنلاین، استفاده می شوند و پیاده سازی توابع پایه شبکه های عصبی چیبشف به تنها سیگنال های مطلوب، بستگی دارند. الگوریتم افکنش هموار برای اطمینان از این بکار گرفته می شود که پارامترهای تخمینی در تعدادی مجموعه کراندار شناخته شده، باقی می مانند. شبیه سازی های عددی برای نشان دادن عملکرد کنترلر پیشنهادی، ارائه می شوند.
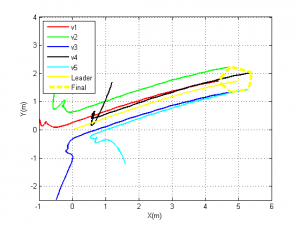
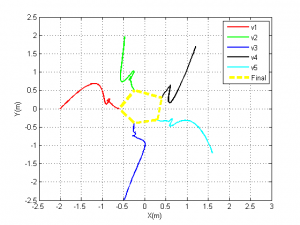
مشارکت اصلی این پروژه، طراحی کنترلر تشکیل بازخورد خروجی وفقی غیرمتمرکز برپایه شبکه عصبی برای یک دسته از سیستم های چند عاملی نامعین می باشد. کنترلر پیشنهادی می تواند یک گروه از عامل ها را وادار به ردیابی مسیر متغیر با زمان مطلوب و در عین حال، حفظ یک تشکیل هندسی مطلوب، بطور همزمان، حتی در حضور، دینامیک های عامل مجهول و آشفتگی های بیرونی کند، همانگونه که در شبیه سازی ها نشان داده شد؛ بنابراین، کنترلر پیشنهادی نه تنها در برابر عدم قطعیت های ساخت یافته بلکه همچنین در برابر عدم قطعیت های غیرساخت یافته، مقاوم است. مطالعات مقایسه ای بین کنترلر پیشنهادی و چندین کنترلر دیگر (یعنی، کنترلر بدون بازخورد تشکیل و کنترلر بازخورد خطی)، نشان می دهند که عملکرد کنترل پیشنهادی نسبت به کنترلرهای دیگر، برتر است. در این پروژه، فرض می شود که مسیر مطلوب برای همه عامل های درون تشکیل، مهیا می باشند. مسئله ردیابی اجماع بازخورد خروجی و یا کنترل ردیابی تشکیل برای سیستم های چند عاملی مرتبه دوم دارای عدم قطعیت، چالش برانگیزتر می شود اگر تنها یک زیرمجموعه از عامل های گروه به مسیر مرجع مشترک (یا رهبر) دسترسی داشته باشند، و این موضوع نیاز به بررسی های بیشتر دارد.
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.