دانلود شبیه سازی مقاله کنترل قوی تطبیقی ربات های کابلی کاملا محدود
| عنوان فارسی |
کنترل قوی تطبیقی ربات های کابلی کاملا محدود: رویکرد اختلال تکین |
| عنوان انگلیسی |
Adaptive robust control of fully constrained cable robots: singular perturbation approach |
| کلمات کلیدی |
ربات های موازی کابل محور؛ کابل های الاستیکی؛ عدم قطعیت های پارامتریک و بدون ساختار؛ اختلال تکین؛ کنترل ترکیبی؛ کنترل قوی تطبیقی |
| درسهای مرتبط |
کنترل مدرن |
| تعداد صفحات انگلیسی : 14 | نشریه : Springer |
| سال انتشار : 2016 | تعداد رفرنس مقاله : 28 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Nonlinear Dynamics (دینامیک غیرخطی) |
| ترجمه: ندارد | گزارشکار : دارد (12 صفحه به صورت فایل WORD و PDF که به توضیحات مربوط به شبیه سازی پرداخته است) + فیلم آموزشی 5 دقیقه ای که نحوه ران کردن شبیه سازی ها و گرفتن خروجی ها را نشان داده است | شبیه سازی : دارد (4 فایل شبیه سازی متلب با فرمت .m و 4 فایل سیمولینک متلب با فرمت .mdl و 3 فایل فازی با فرمت .fis) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب کنترل ربات کابلی
ربات های کابلی موازی کاملاً مقید (CDPR ها)، یک مکانیزم زنجیره سینماتیکی بسته محدود شده دارند که در آن تعداد کابل های فعال سازی شده، بیشتر از درجات آزادی ربات می باشد. بخاطر استفاده از کابل های سبک وزن در ساختار این دسته از ربات ها، وزن قطعات متحرک به میزان قابل توجهی کاهش یافته است و در نتیجه، برای کار سرعت بالا برروی یک قطعه کار بسیار بزرگ، بسیار مناسب هستند. با این حال، کابل ها تنها قادر به تحمل نیروی کششی معینی هستند و در نتیجه برای جلوگیری از گسیختگی ساختاری، الگوریتم های کنترل باید بگونه ای طراحی شوند که کابل ها برای همه مانورها برروی قطعه کار، در حالت کشش باقی بمانند. این ویژگی باعث می شود که کنترل فیدبک CDPR کاملاً مقید، چالش برانگیزتر از ربات های موازی باشد. چندین الگوریتم کنترل رایج در کنترل CDPR ها بکار گرفته شده که می توان کنترل PID استوار، نظریه خطی سازی فیدبک، کنترل مد لغزشی، روش های مبتنی بر لیاپونوف، کنترل یادگیری تکرار شونده استوار، کنترل فازی بعلاوه PI، کنترل امپدانسی، کنترل بهینه، کنترل وفقی و کنترل وفقی استوار را نام برد. با این حال، در این پژوهش ها، فرض شده است که کابل ها، عناصر بدون جرم و غیرکشسان ایده آل هستند. لازم به ذکر است که در عمل، تحت شرایط اعمال نیروهای کششی به کابل ها، ممکن است به عنوان عناصر کشسان عمل کنند. این کشسانی می تواند باعث ارتعاش های ناخواسته در بازوی انتهایی و تنزل عملکرد CDPR های کاملاً مقید در کاربردهای نیازمند به دقت زیاد در پهنای باند زیاد، گردد. به این دلیل، الگوریتم های کنترل پیشنهادی مربوط به CDPR باید به نحو کارآمد ارتعاشات را میرا کنند و در عمل عملکرد ردیابی مناسبی فراهم کنند که این هدف کنترلر پیشنهادی ارائه شده در این پروژه می باشد.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده است و در ادامه نیز تصویری از خروجی های شبیه سازی قرار داده شده است:
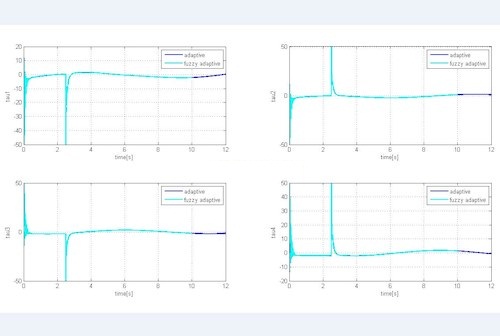
این پروژه به بررسی کنترل استوار وفقی ربات های موازی کابلی کاملاً مقید با کابل های کشسان می پردازد. فرض می شود که مدل فنر محوری خطی می تواند بطور مناسب توصیف کننده اثرات دینامیک های غالب کابل ها با این فرض شود که یک کنترلر ترکیبی بطور همزمان، برای مقابله با عدم قطعیت های کراندار و میرا کردن ارتعاشات نامطلوب کابل ها بخاطر کشسانی کابل ها، طراحی گردد. علاوه بر آن، باعث می شود همه کابل ها در حین حرکت در فضای کار ربات، در حالت کشش باقی بماند. با استفاده از نتایج نظریه آشفتگی تکین، اثبات می شود که الگوریتم کنترل پیشنهادی به نحو کارآمد قادر به پایدار سازی سیستم حلقه بسته از لحاظ یکنواخت بودن در نهایت کراندار، می باشد. در نهایت اینکه، عملکرد ردیابی مناسب کنترلر پیشنهادی از طریق چندین شبیه سازی برروی یک ربات موازی کابلی تخت کاملاً مقید، اعتباریابی می شود.
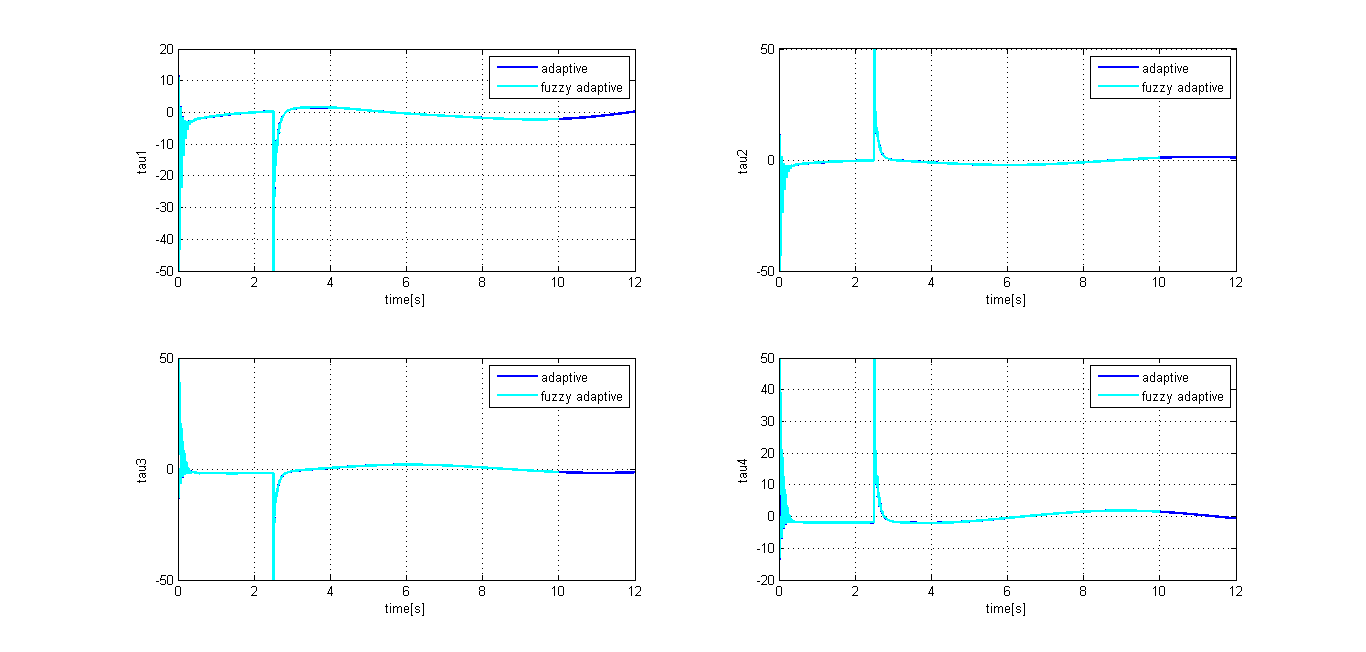
در ادامه، تعدادی دیگر از خروجی های شبیه سازی قرار داده شده است:








دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.