دانلود شبیه سازی مقاله کنترل کننده یکپارچه برای دنبال کردن مسیر وسیله نقلیه
| عنوان فارسی |
کنترل کننده قوی یکپارچه برای دنبال کردن مسیر وسیله نقلیه |
| عنوان انگلیسی |
Integrated robust controller for vehicle path following |
| کلمات کلیدی |
دنبال کردن مسیر وسیله نقلیه؛ 4WS؛ DYC؛ کنترل قوی؛ ترکیب – μ |
| درسهای مرتبط |
مهندسی کامپیوتر |
| تعداد صفحات انگلیسی : 22 | نشریه : Springer |
| سال انتشار : 2014 | تعداد رفرنس مقاله : 18 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : Multibody System Dynamics (دینامیک سیستم چند بدنه ای) |
| ترجمه: ندارد | گزارشکار : دارد (توضیحات مربوط به پروژه و خروجی های شبیه سازی و توضیحات کدها در یک فایل 20 صفحه ای در قالب WORD و PDF ارائه شده است) | شبیه سازی : دارد (2 فایل شبیه سازی در نرم افزار متلب با فرمت .m) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
پروژه متلب کنترل مسیر خودرو
با رشد جمعیت، تعداد خودروها و مسافران در خیابان ها و بزرگراه ها افزایش یافته است و بیشتر باعث بوجود آمدن مسائل ترافیکی شده اند. چندین اقدام، مانند ساختن بزرگراه ها و جاده های جدید برای کاهش ازدحام ترافیکی و افزایش ایمنی مورد ملاحظه قرار گرفته اند، اما چنین اقداماتی بخاطر محدودیت های محیطی و هزینه ای، همیشه کافی نیستند. یکی از روش های بهبود ایمنی جاده ها، حذف خطاهای عنصر انسانی در حین رانندگی است. این امر می تواند منجر به توسعه فنآوری رانندگی خودکار، که مبنای «سیستم های حمل و نقل هوشمند» (ITS) است و در سالهای اخیر توسط پژوهشگران بسیاری مطالعه شده اند، گردد. وظیفه اصلی رانندگی خودکار، این است که کاری کنیم که یک خودروی خودران، به صورت خودکار یک مسیر مرجع را دنبال کند. بنابراین در طی این دنبال کردن مسیر، چندین مسئله باید مورد ملاحظه قرار گیرند تا کنترل مسیر قابل قبول، حاصل شود. کنترلرهای خودرو که این الزامات را برآورده می کنند، دنبال کنندگان مسیر نامیده می شوند. هدف و کاربرد یک کنترلر دنبال کننده مسیر، کمینه سازی فاصله جانبی بین خودرو و یک مسیر تعریف شده، کمینه سازی اختلاف جهت خودرو و جهت مسیر و محدود سازی ورودی کنترلی برای هموارسازی حرکت ها و در عین حال حفظ پایداری، می باشند.
با توسعه نظریه های کنترل استوار، کاربردهای کنترلرهای استوار، ممکن شده است. یکی از کاربردهای مهم کنترل استوار در وسایل نقلیه، یعنی در وسایل نقلیه هوایی، دریایی و زمینی، می باشد.
در این مقاله، فرآیند طراحی کنترلر پیشنهادی به بحث گذاشته می شود. هدف، طراحی یک کنترلر استوار برای مسئله دنبال کردن مسیر در حضور عدم قطعیت ها می باشد. این روش کنترل به ما امکان ملاحظه عدم قطعیت های غیرساختارمند و پارامتری ناشی از دینامیک های مدل سازی نشده، ساده سازی ها، غیرخطی های نادیده گرفته شه و تغییرات پارامتری سیستم را می دهد. این چیزی است که غیرممکن است یا در شامل کردن آن در دیگر روش های کنترلی، مشکلات زیادی بوجود می آورد.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از تصاویر مربوط به خروجی آن قرار داده شده است:
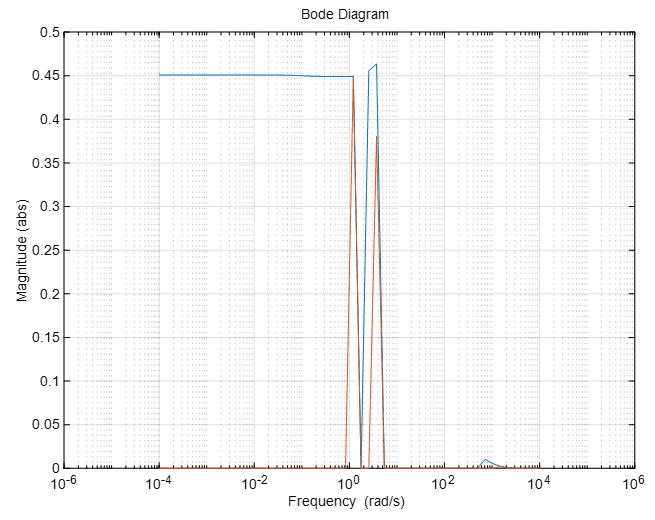
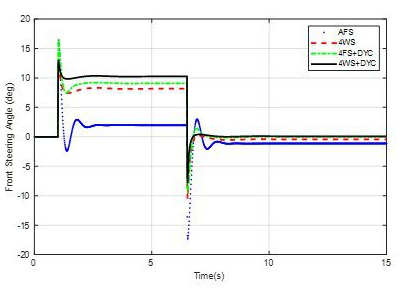
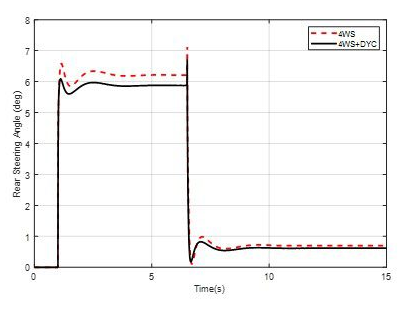
در این پروژه، طراحی کنترلرهای یکپارچه برای دنبال کردن خودکار مسیر وسایل نقلیه، به بحث گذاشته می شود. مدل ریاضیاتی آن براساس حذف اجباری خطاهای جانبی و جهتی توسط کنترلر، استخراج شده است. برای طراحی کنترلری که عدم قطعیت های مدل خودرو را مدنظر قرار می دهد، نظریه کنترل استوار با استفاده از روش سنتز μ بکار گرفته شده است. چهار نوع سیستم کنترل، یعنی AFS، 4WS، AFS+DYC و 4WS+DYC برای مقایسه، ابداع شده اند. شبیه سازی های عددی برای ارزیابی اثربخشی کنترلر و مقایسه پاسخ انواع کنترل ها، انجام شدند. نتایج بدست آمده برای سه مانور مختلف، یعنی یک مسیر دایره ای برروی یک جاده اصطکاک زیاد، یک مانور تغییر لین (خطوط جاده ها) و یک مسیر دایره ای اصطکاک پایین، نشان دادند که نه تنها کنترلر 4WS+DYC قادر به دنبال کردن مسیر مطلوب با خطاهای جانبی و جهتی کم بود، بلکه همچنین کارایی بسیار بهتری در مقایسه با کنترلرهای دیگر در همه وضعیت ها داشت. این کنترلر از حداکثر پتانسیل های کنترلی در شتاب های جانبی کم و زیاد و زمان تغییر یک پارامتر هنگام حرکت وسیله نقلیه، استفاده می کند.




دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.