دانلود شبیه سازی مقاله کنترل موتور DC بدون جاروبک سه فاز با سنسور جریان واحد
| عنوان فارسی |
استراتژی کنترلی برای موتور DC بدون جاروبک سه فاز چهار سوئیچ با استفاده از سنسور جریان واحد |
| عنوان انگلیسی |
A Control Strategy for Four-Switch Three-Phase Brushless DC Motor Using Single Current Sensor |
| کلمات کلیدی |
موتور dc بدون جاروبک (BLDC)؛ اینورتر سه فاز چهار کلیده؛ کنترل کننده انتگرالی – تناسبی (PI) وفقی تک نورونی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 9 | نشریه : IEEE |
| سال انتشار : 2009 | تعداد رفرنس مقاله : 22 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : IEEE Transactions on Industrial Electronics (مجله الکترونیک صنعتی) |
| ترجمه: ندارد | گزارشکار : فایل راهنمای 2 صفحه ای دارد | شبیه سازی : دارد (1 فایل شبیه سازی در سیمولینک متلب با فرمت .slx) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
کاربرد سنسور جریان در کنترل موتور BLDC
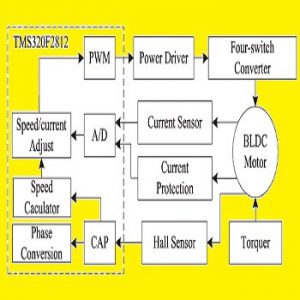
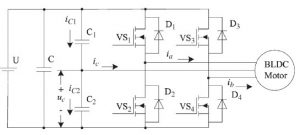
از آنجا که موتورهای dc بدون جاروبک (BLDC)، ویژگی های خوبی مانند ساخت ساده، قابلیت اطمینان زیاد، آلودگی الکترومغناطیسی کم و چگالی توان زیاد دارند، بطور گسترده ای در سیستم های سروو و سیستم های درایو توان پایین، استفاده می شوند. عملکرد چنین موتورهایی به میزان قابل توجهی بخاطر توسعه زیاد الکترونیک قدرت، میکروالکترونیک، عملکرد مغناطیسی آهنرباها و فنآوری کنترل حرکت در سال های اخیر، بهبود یافته است. امروزه، مطالعات بسیاری بر این متمرکز شده اند که چگونه هزینه موتور BLDC و سیستم کنترل آن بدون تنزل عملکرد، کاهش یابد. یک درایو موتور BLDC سه فاز چهار کلیدی نوین برای ساده سازی ساختار توپولوژی اینورتر شش کلیدی متداول، پیشنهاد شده است. کاهش هزینه، تلاشی ارزشمند است، اما جریان فاز کنترل ناپذیر باعث بردار ولتاژ نامتقارن می شود و شکل موج آن اعوجاج زیادی با شکل موج مستطیلی دارد.
یک استراتژی کنترل دو حلقه ای پیشرفته براساس توپولوژی چهار کلیدی برای درایو موتور BLDC، پیشنهاد شده است. یک کنترلر PI وفقی تک نورونی بوسیله حلقه بیرونی برای توسعه عملکرد کنترل سرعت، استفاده می شود. پیاده سازی این الگوریتم آسان است و هزینه کل سیستم کاهش می یابد زیرا تنها یک سنسور جریان لازم است. در آخر، عملکرد سنجش شده بوسیله نتایج شبیه سازی و تجربی تحت شرایط کاری مختلف، در سرعت های مختلف و تحت بارهای مختلف، تایید شد. لازم به ذکر است که کاهش کمیت (شاید منظور تعداد است) سنسور جریان قطعاً مزایای منفی برای سیستم کنترل بوجود می آورد، مانند محدود سازی جریان بیشینه در تعدادی از مدها قابل ذکر است. علاوه بر آن، این برنامه میل به پیچیده شدن دارد زیرا الگوریتم ویژه ای برای جبرانسازی کاهش حسگر جریان لازم است. در نتیجه، بالاسری نرم افزاری افزایش می یابد. برای پژوهش های بیشتر، نحوه بهبود قابلیت اطمینان سیستم و بهینه سازی طراحی نرم افزاری قطعاً نکته کلیدی جهت پیاده سازی استراتژی پیشنهادی در کاربرد صنعتی می باشد.
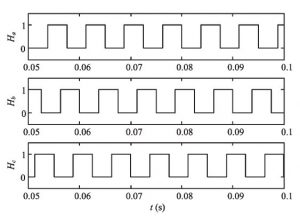
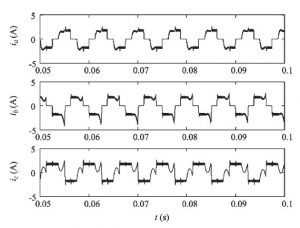
این شبیه سازی با استفاده از نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز تعدادی از نتایج خروجی آن قرار داده شده است:

دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.