
دانلود شبیه سازی مقاله سیستم سرعت قابل تنظیم کنترل شده با بردار در موتور القایی
| عنوان فارسی |
شبیه سازی سیستم سرعت قابل تنظیم کنترل شده با بردار در موتور القایی با استفاده از سیمولینک |
| عنوان انگلیسی |
Simulation of Vector Controlled adjustable Speed System of Induction Motor Based on Simulink |
| کلمات کلیدی |
موتور AC؛ کنترل برداری؛ متلب (MATLAB)؛ شبیه سازی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد صفحات انگلیسی : 4 | نشریه : IEEE |
| سال انتشار : 2011 | تعداد رفرنس مقاله : 8 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |

| آیا این مقاله برای بیس پایان نامه مناسب است؟ : بله | آیا این مقاله برای ارائه کلاسی مناسب است؟ : بله |
| برنامه ای که در آن مقاله شبیه سازی شده است : این مقاله در محیط متلب پیاده سازی شده است | نام مجله مقاله : International Conference on Computer Science and Service System (CSSS) (کنفرانس بین المللی سیستم سرویس و علوم کامپیوتر) |
| ترجمه: دارد (فایل ترجمه 11 صفحه ای در قالب فایل ورد و پی دی اف) | گزارشکار : دارد (گزارشکار 12 صفحه ای در قالب فایل ورد که به توضیحات مربوط به شبیه سازی پرداخته است) | شبیه سازی : دارد (یک فایل سیمولینک متلب) |
این مقاله در محیط متلب به صورت کامل شبیه سازی شده و در صورت خرید و دانلود مقاله شما به راحتی قادر خواهید بود از برنامه مربوطه استفاده نمایید. در صورت بروز هر گونه مشکل در نحوه ی اجرای برنامه سایت سیگمالند به مدت 24 ساعت بعد از خرید محصول، پشتیبانی آن را تا اجرای کامل برعهده دارد.
شبیه سازی کنترل برداری
موتورهای القایی جریان متناوب، به صورت گسترده در سیستم های درایو AC مدرن بکار می روند. این درایوها دارای ساختار ساده، قیمت کم، دوام مطلوب، و ظرفیت جریان دهی کافی هستند. ضمناً نگهداری از آن ها نیز با بیشترین سهولت ممکن انجام می شود. این در حالیست که موتورهای القایی خطی، بدلیل ویژگی های غیرخطی همچون مرتبه بالا، غیرخطی بودن، تزویج چندمتغیره و قوی ، در مقایسه با موتورهای DC در کنترل سرعت عملکرد مطلوب و بهینه ای از خود بجا نمی گذارند. با توسعه فناوری الکترونیک قدرت و نظریه کنترل موتور القایی AC، علی الخصوص ظهور پردازشگرهای سیگنال دیجیتال (DSP) و ASIC، و اعمال الگوریتم های کنترلی متعدد در حوزه کنترل حرکت، از جمله کنترل بُرداری، کنترل مستقیم با گشتاور ، کنترل تطبیقی و کنترل سرعت بدون حسگر، عملکرد سیستم تنظیم سرعت AC، روز به روز بهتر می شود. موتور القایی AC به صورت تدریجی جایگزین موتورهای DC شده است ، و به عنوان موتور اصلی برای راه اندازی موتورها در سیستم های انتقال بکار می رود. این موتور نقش مهم تر و گسترده تری را در تمامی حوزه های زندگی روزمره افراد، و حوزه های صنعتی و کشاورزی ایفا می کند. در بحث فناوری کنترل موتور القایی AC ، کنترل برداری یک روش کنترلی با بازدهی مطلوب است که به صورت گسترده مورد استفاده قرار دارد. اصول عملکردی این روش بر مبنای نظریه تبدیل مختصات قرار دارند. مطابق این نظریه، دو مولفه AC متعامد در حوزه زمان، به دو مولفه DC متعامد در حوزه مکان/ فضا تبدیل می شوند. در ادامه ، جریان های استاتور موتور القایی AC، به دو مولفه مستقل کنترل DC : 1- مولفه تحریک، 2- مولفه گشتاور تقسیم می شوند. آن ها به صورت جداگانه برای کنترل شار مغناطیسی و گشتاور موتور بکار می روند. در نهایت، دو مولفه کنترل DC به متغیرهای AC خلاصه می شوند، و موتور القایی AC از طریق آن ها کنترل می شود. در واقع شرایط همانند کنترل موتور DC از طریق کنترل شار مغناطیسی و گشتاور است. در شرایط جدید، عملکرد دینامیک پروسه کنترل سرعت به شکل چشمگیری ارتقا می یابد. در این پروژه، بر اساس تحلیل مدل ریاضیاتی دینامیک موتور آسنکرون، و اصل کنترل برداری، سیستم کنترل موتور بر اساس روش کنترل برداری تعریف می شود. مدل شبیه سازی شده از سیستم موتور القایی در محیط متلب/ سیمولینک اجرا می شود. عملکرد استاتیک و دینامیک سیستم تنظیم سرعت و کنترل برداری موتور القایی AC ، بر اساس نتایج شبیه سازی ها مورد تایید قرار می گیرد.
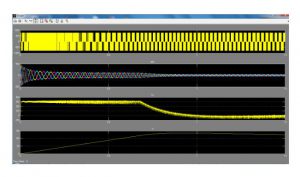
بر اساس تحلیل های کافی به عمل آمده از مدل ریاضیاتی موتور القایی و اصول برداری، مدل شبیه سازی در محیط متلب/ سیمولینک ساخته می شود. نتایج شبیه سازی ها نشان داده که پاسخ دینامیک سرعت موتور، شتاب خوبی دارد. ردگیری پایدار دقت بالایی دارد و گشتاور از ویژگی پاسخ لحظه ای برخوردار است. تمامی این موارد با تحلیل نظری از تنظیم سرعت با فرکانس متغیر و کنترل برداری سازگاری دارند. از سوی دیگر، این شیوه بکار رفته برای تعریف مدل شبیه سازی ساده و مطلوب است. بدین ترتیب ابزارهای کافی برای پیاده سازی سیستم کنترلی و عیب زدایی از آن فراهم می شوند.
این شبیه سازی در محیط نرم افزار متلب (MATLAB) انجام شده و در ادامه نیز شکل خروجی مربوط به شبیه سازی قرار داده شده است:


نماد اعتماد الکترونیکی

لوگو طلایی
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.